

Antiderivative Formeln und Gleichungen, Beispiele, Übungen

- 4859
- 541
- Jasmine Kupprion
A antiderivativ F (x) einer Funktion F(x) wird auch als primitiv oder einfach als unbestimmte Integral dieser Funktion bezeichnet, wenn in einem bestimmten Intervall Yo, Es stimmt, dass F '(x) = f (x)
Nehmen wir zum Beispiel die folgende Funktion:
f (x) = 4x3
Ein Antiderivierungen dieser Funktion ist f (x) = x4, da durch die Ableitung von f (x) durch die Absivierungsregel für die Befugnisse:

Es wird genau f (x) = 4x erhalten3.
Dies ist jedoch nur eines der vielen Antiderivate von F (x), da diese andere Funktion: g (x) = x4 + 2 Es ist auch, weil es durch die Ableitung von G (x) in Bezug auf x das gleiche ist, wird zurück erhalten f (x) erhalten.
Lassen Sie uns es überprüfen:
=4x^3)
Denken Sie daran, dass der, der von einer Konstante abgeleitet ist, 0 ist. Daher zum Begriff x4 Sie können jede Konstante hinzufügen und sein Derivat wird weiterhin 4x sein3.
Es wird der Schluss gezogen, dass jede Funktion der allgemeinen Form f (x) = x4 + C, wo C eine echte Konstante ist, dient als antiderivativ von f (x).
Das vorherige illustrative Beispiel kann wie folgt ausgedrückt werden:
df (x) = 4x3 Dx
Das undefinierte Antiderivations- oder Integral wird mit dem Symbol ∫ ausgedrückt, deshalb:
F (x) = ∫4x3 dx = x4 + C
Wobei die Funktion f (x) = 4x3 Es wird genannt integrieren, und c ist das Integrationskonstante.
[TOC]
Beispiele für Antiderivate
Abbildung 1. Das Anti -Hotley ist nichts anderes als ein unbestimmte Integral. Quelle: Pixabay. Das Finden eines Antiderivativen einer Funktion ist in einigen Fällen, in denen die Derivate bekannt sind. Seien Sie beispielsweise die Funktion f (x) = sen x, ein unternehmerisches Denn eine andere Funktion f (x), so dass es beim Abgeleiten f (x) erhalten wird. F (x).
Diese Funktion kann sein:
F (x) = - cos x
Überprüfen Sie, ob es wahr ist:
F '(x) = (- cos x)' =- (-sen x) = sin x
Deshalb können wir schreiben:
∫sen x dx = -cos x + c
Zusätzlich zum Kennen der Derivate gibt es grundlegende und einfache Integrationsregeln, um unbestimmte Antiderivation oder Integral zu finden.
Kann Ihnen dienen: aufeinanderfolgende DerivateSei dann eine echte Konstante: dann:
1.- ∫kdx = k ∫dx = kx + c
2.- ∫kf (x) dx = k ∫f (x) dx
Wenn eine H (x) -Funktion als Summe oder Subtraktion von zwei Funktionen ausgedrückt werden kann, dann ist das unbestimmte Integral:
3.- ∫H (x) dx = ∫ [f (x) ± g (x)] dx = ∫f (x) dx ± ∫g (x) dx
Dies ist Eigentum der Linearität.
Der Machtregel Für Integrale kann es auf diese Weise festgelegt werden:

Im Fall von n = -1 wird die folgende Regel verwendet:
5.- ∫X -1 Dx = ln x +c
Es ist leicht zu demonstrieren, dass die Ableitung von ln x Es ist genau X -1.
Differentialgleichung
Eine Differentialgleichung ist eine, in der das Unbekannte als Derivat ist.
Nach der vorherigen Analyse ist es nun leicht zu erkennen, dass der inverse Betrieb zum Derivat das undefinierte Antiderivations- oder Integral ist.
Sei f (x) = y '(x), dh aus einer bestimmten Funktion abgeleitet. Wir können die folgende Notation verwenden, um dieses Ableitungen anzuzeigen:
=y'(x)=\fracdydx)
Es folgt unmittelbar:
dy = f (x) dx
Das Unbekannte der Differentialgleichung ist die Funktion y (x), deren Ableitung f (x) ist. Um es zu löschen, ist der vorherige Ausdruck auf beiden Seiten integriert, was der Anwendung des Antiderivativen entspricht:
∫dy = ∫f (x) dx
Das linke Integral wird durch Integrationsregel 1 mit k = 1 gelöst, und somit wird der gesuchte -await gelöscht:
und (x) = ∫f (x) dx = f (x) + c
Und da C eine reale Konstante ist, muss die Anweisung in jedem Fall ausreichend zusätzliche Informationen enthalten, um den Wert von C zu berechnen. Das nennt man Ausgangsbedingung.
Wir werden Beispiele für die Anwendung all dessen im nächsten Abschnitt sehen.
Kann Ihnen dienen: pünktliche SchätzungAntidersivierte Übungen
- Übung 1
Wenden Sie die Integrationsregeln an, um die folgenden undefinierten Antiderivate oder Integrale der angegebenen Funktionen zu erhalten und die Ergebnisse so weit wie möglich zu vereinfachen. Es ist zweckmäßig, das Ergebnis durch Ableitung zu überprüfen.
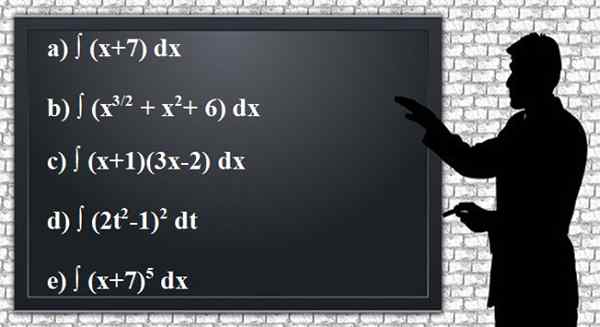 Figur 2. Definierte anterivierte oder integrale Übungen. Quelle: Pixabay.
Figur 2. Definierte anterivierte oder integrale Übungen. Quelle: Pixabay. Lösung für
Wir wenden zuerst Regel 3 an, da die Integration die Summe von zwei Begriffen ist:
∫ (x +7) dx = ∫ xdx +∫7dx
Zum ersten Integral wird die Regel der Befugnisse angewendet:
∫ xdx = (x2 /2)+c1
In der zweiten integralen Regel 1 gilt K = 7:
∫7dx = 7∫dx = 7x + c2
Und jetzt werden die Ergebnisse hinzugefügt. Die beiden Konstanten werden in eine gruppiert, generell als C bezeichnet:
∫ (x+7) dx = (x2 /2) + 7x + c
Lösung b
Durch Linearität zersetzt sich dieser integrale Integral in drei einfachere Integrale, auf die die Regel der Befugnisse angewendet wird:
∫ (x3/2 + X2 + 6) dx = ∫x3/2 Dx + ∫x2 dx +∫6 dx =

Beachten Sie, dass für jedes Integral eine Integrationskonstante erscheint, sie jedoch in einem einzigen Anruf C treffen.
Lösung c
In diesem Fall ist es zweckmäßig, die Verteilungseigenschaft der Multiplikation zur Entwicklung der Integration anzuwenden. Dann verwenden Sie die Regel der Befugnisse, um jedes Integral separat zu finden, wie im Vorjahr.
∫ (x+1) (3x-2) dx = ∫ (3x2-2x+3x-2) dx = ∫ (3x2 + X - 2) dx
Der aufmerksame Leser wird feststellen, dass die beiden zentralen Begriffe ähnlich sind, daher werden sie vor der Integration reduziert:
∫ (x+1) (3x-2) dx = ∫3x2 dx + ∫ x dx + ∫- 2 dx = x3 + (1/2) x2 - 2x + c
Lösung e
Eine Möglichkeit, das Integral zu lösen. Da der Exponent jedoch höher ist.
Kann Ihnen dienen: kontinuierliche ZufallsvariableDie variable Änderung ist wie folgt:
U = x + 7
Auf beiden Seiten abgeleitet: diesen Ausdruck:
du = dx
Das Integral wird mit der neuen Variablen in ein einfacheres Umgang mit der Befugnisregel aufgenommen:
∫ (x+7)5 Dx = ∫ u5 du = (1/6) u6 + C
Schließlich wird die Änderung zurückgegeben, um zur ursprünglichen Variablen zurückzukehren:
∫ (x+7)5 Dx = (1/6) (x+7)6 + C
- Übung 2
Ein Teilchen ist anfangs in Ruhe und bewegt sich entlang der x -Achse entlang. Seine Beschleunigung für t> 0 wird durch Funktion a (t) = cos t angegeben. Es ist bekannt, dass bei T = 0 die Position x = 3 beträgt, alle in Einheiten des internationalen Systems. Es wird aufgefordert, Geschwindigkeit V (T) und Position x (t) des Teilchens zu finden.
Lösung
Da die Beschleunigung die erste aus der Geschwindigkeit in Bezug auf die Zeit ist, haben Sie die folgende Differentialgleichung:
a (t) = v '(t) = cos t
Es folgt dem:
v (t) = ∫ cos t dt = sin t + c1
Andererseits wissen wir, dass Geschwindigkeit wiederum das Abgang der Position ist, deshalb integrieren wir uns wieder:
x (t) = ∫ v (t) dt = ∫ (sin t + c1) dt = ∫sen t dt + ∫c1 dt = - cos t + c1 t + c2
Integrationskonstanten werden aus den in der Erklärung angegebenen Informationen ermittelt. Erstens sagt er, dass das Partikel anfänglich in Ruhe war, daher V (0) = 0:
V (0) = sin 0 + c1 = 0
C1 = 0
Dann musst du x (0) = 3:
x (0) = - cos 0 + c1 0 + c2 = - 1 + c2 = 3 → c2 = 3+1 = 4
Geschwindigkeits- und Positionsfunktionen sind definitiv wie folgt:
v (t) = sen t
x (t) = - cos t + 4
Verweise
- Engler, a. 2019. Integralrechnung. Nationale Universität der Küste.
- Larson, r. 2010. Berechnung einer Variablen. 9na. Auflage. McGraw Hill.
- Kostenlose Mathematiktexte. Antiderivate. Erholt von: Mathematik.Liibretrettextexte.Org.
- Wikipedia. Antiderivativ. Abgerufen von: in.Wikipedia.Org.
- Wikipedia. Unbestimmte Integration. Geborgen von: ist.Wikipedia.Org.
- « Die 13 Arten von Werten und ihre Bedeutung (mit Beispielen)
- Formel und Gleichungen der elektrischen Potential, Berechnung, Beispiele, Übungen »