

Ortonormale Baseneigenschaften, Beispiele und Übungen
- 4882
- 216
- Rieke Scheer
A Ortonormale Basis Es wird mit senkrechten Vektoren miteinander gebildet und dessen Modul auch 1 wert ist (Einheitsvektoren). Denken Sie daran, dass eine Basis B in einem Vektorraum V, Es ist definiert als eine Reihe linear unabhängiger Vektoren, die diesen Raum generieren können.
Ein Vektorraum ist wiederum eine abstrakte mathematische Einheit, weshalb Elemente Vektoren sind, die im Allgemeinen mit physikalischen Größen wie Geschwindigkeit, Festigkeit und Verschiebung oder auch mit Matrizen, Polynomen und Funktionen verbunden sind.
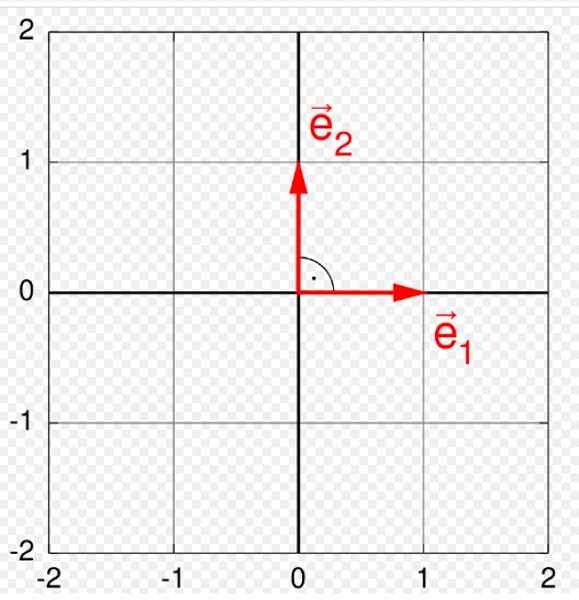
Abbildung 1. Orthonormale Basis in der Ebene. Quelle: Wikimedia Commons. Quartl [CC BY-SA (https: // creativeCommons.Org/lizenzen/by-sa/3.0)]]. Vektoren haben drei unterschiedliche Elemente: Größe oder Modul, Richtung und Bedeutung. Eine ortonormale Basis ist besonders nützlich, um mit ihnen zu repräsentieren und zu arbeiten, da jeder Vektor, der zu einem bestimmten Vektorraum gehört V, .
Auf diese Weise werden Operationen zwischen Vektoren wie Summe, Subtraktion und den verschiedenen im Raum definierten Produkttypen analytisch analysiert.
Zu den am häufigsten verwendeten Physikbasen gehört die Basis, die von Einheitsvektoren gebildet wird Yo, J Und k Darstellung der drei unterschiedlichen Richtungen von drei dimensionaler Raum: hohe, breite und Tiefe. Diese Vektoren sind auch unter dem Namen von bekannt Einheitliche kanonische Vektoren.
Wenn stattdessen Vektoren in einem Flugzeug bearbeitet werden, würde dies mit zwei dieser drei Komponenten ausreichen, während nur einer.
[TOC]
Basis Eigenschaften
1- eine Basis B Es ist der kleinstmögliche Satz von Vektoren, die den Vektorraum erzeugen V.
2- Die Elemente von B Sie sind linear unabhängig.
3- jede Basis B eines Vektorraums V, ermöglicht, alle Vektoren von auszudrücken V als eine lineare Kombination aus IT und diese Form ist für jeden Vektor einzigartig. Deshalb a B Es ist auch als bekannt als Generatorsystem.
4- Der gleiche Vektorraum V kann unterschiedliche Basen haben.
Kann Ihnen dienen: Zentrifugalkraft: Formeln, wie es berechnet wird, Beispiele, ÜbungenBeispiele für Basen
Unter mehreren Beispielen für orthonormale Basen und Basen im Allgemeinen:
Die kanonische Basis in ℜ N
Auch als natürliche Basis oder Standardbasis von ℜ bezeichnet N, Wo ℜ N Es ist Raum n-dimensional, Zum Beispiel ist dreidimensionaler Raum ℜ ℜ 3. Zum Wert von N Es wird genannt Abmessungen des Vektorraums und bezeichnet als Dim (v).
Alle Vektoren, die zu ℜ gehören N Sie werden durch vertreten N-usa Bestellt. Für den Raum ℜN, Die kanonische Basis ist:
Und1 =; Und2 =; UndN =
In diesem Beispiel haben wir die Notation mit Klammern oder „Klammern“ und fett für Einheitsvektoren verwendet Und1, Und2, Und3..
Die kanonische Basis in ℜ3
Familienvektoren Yo, J Und k Sie geben dieselbe Darstellung zu und sie reichen für drei aus, um die Vektoren in ℜ zu repräsentieren 3:
Yo =; J =; k =
Dies bedeutet, dass die Basis wie folgt ausgedrückt werden kann:
B = ; ;
Um zu überprüfen, ob sie linear unabhängig sind, ist die mit ihnen gebildete Determinante nicht null und auch gleich 1:

F = N = 4Yo -7J + 0k N.
Deshalb Yo, J Und k Machen Sie ein ℜ -Generatorsystem zusammen 3.
Andere ortonormale Basen in ℜ3
Die im vorherige Abschnitt beschriebene Standardbasis ist nicht die einzige Ortonormale Basis in ℜ3. Hier haben wir zum Beispiel die Basen:
B1 = ; ;
B2 = ; ;
Es kann gezeigt werden, dass diese Basen orthonormal sind. Denn dies erinnern wir uns an die Bedingungen, die erfüllt sein müssen:
Kann Ihnen dienen: wellige Optik-Vektoren, die die Basis bilden.
-Jeder von ihnen muss einheitlich sein.
Wir können es überprüfen, wenn wir wissen, dass die von ihnen gebildete Determinante nicht null und gleich 1 sein muss.
1 Genau das der zylindrischen Koordinaten ρ, φ und z, eine andere Möglichkeit, Vektoren im Raum auszudrücken.
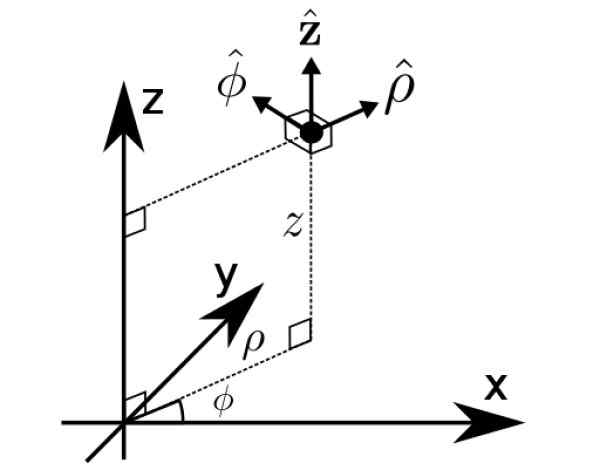 Figur 2. Zylindrische Koordinaten. Quelle: Wikimedia Commons. Math Buff [CC BY-S (https: // creativeCommons.Org/lizenzen/by-sa/4.0)]].
Figur 2. Zylindrische Koordinaten. Quelle: Wikimedia Commons. Math Buff [CC BY-S (https: // creativeCommons.Org/lizenzen/by-sa/4.0)]]. Gelöste Übungen
- Übung 1
Zeigen Sie, dass die Basis b = ; ; ist ortonormal.
Lösung
Um zu zeigen, dass die Vektoren senkrecht zueinander sind, werden wir das skalare Produkt verwenden, das auch als interner oder Produktpunkt von zwei Vektoren bezeichnet wird.
Lassen Sie zwei Vektoren oder Und v, Ihr skalares Produkt wird definiert durch:
oder • v = oder.v. cosθ
. θ ist der Winkel zwischen oder Und v, Wenn sie senkrecht sind, bedeutet dies, dass θ = 90 ° und das Skalarprodukt nichtig ist.
Alternativ, wenn die Vektoren in Bezug auf ihre Komponenten angegeben werden: oder =
oder • v = oderX .vX + oderUnd .vUnd + oderz .vz
Auf diese Weise sind die skalaren Produkte zwischen jedem Vektorenpaar:
i) • = (3/5).(-4/5) + (4/5).((3/5) + 0.0 = (-12/25) + (12/25) = 0
Ii) • = 0
iii) • = 0
Für den zweiten Zustand wird das Modul jedes Vektors berechnet, der erhalten wird durch:
│u │ = √ (uX2 + oderUnd2 + oderz2)
Somit sind die Module jedes Vektors:
│ = √ [(3/5)2 + (4/5)2 + 02)] = √ [(9/25) + (16/25)] = √ (25/25) = 1
│ = √ [(-4/5)2 + (3/5)2 + 02)] = √ [(16/25) + (9/25)] = √ (25/25) = 1
Es kann Ihnen dienen: Zweiter Gleichgewichtsbedingung: Erklärung, Beispiele, Übungen│ = √ [02 + 02 + 12)] = 1
Daher sind die drei Einheitsvektoren. Schließlich ist die Determinante, die sie bilden, nicht null und gleich 1:

- Übung 2
Schreiben Sie die Vektorkoordinaten W = In Bezug auf die vorherige Basis.
Lösung
Dazu wird der folgende Satz verwendet:
Sei b = v1, v2, v3,.. vN Eine orthonormale Basis im Weltraum V mit Inlandsprodukt, der Vektor W Es wird wie folgt durch B dargestellt:
W = <W•v1> v1 + <W•v2> v2 +<W•v3> v3 +.. <W•vN> vN
Dies bedeutet, dass wir den Vektor an der Basis B durch Koeffizienten schreiben können <W•v1>, <W•v2>, .. <W•vN>, für die Sie die angegebenen Skalare berechnen müssen:
• = (2).(3/5) + (3).(4/5) + 1.0 = (6/5) + (12/5) = 18/5
• = (2).(-4/5) + (3).(3/5) + 1.0 = (-8/5) + (9/5) = 1/5
• = 1
Mit den erhaltenen skalaren Produkten wird eine Matrix gebaut, genannt Matrix koordinieren von w.
Daher koordiniert der Vektorkoordinaten W In Basis B werden sie ausgedrückt:
[W]B= [(18/5); (1/5); 1]
Die Koordinatenmatrix ist nicht der Vektor, da ein Vektor nicht mit seinen Koordinaten übereinstimmt. Dies sind nur eine Reihe von Zahlen, die dazu dienen, den Vektor an einer bestimmten Basis auszudrücken, nicht den Vektor als solcher. Sie hängen auch von der ausgewählten Basis ab.
Schließlich folgen Sie dem Satz, dem Vektor W würde wie folgt ausgedrückt:
W = (18/5) v1 + (1/5) v2 + v3
Mit: v1 =; v2 =; v3 =, Das heißt die Basisvektoren B.
Verweise
- Larson, r. Grundlagen der linearen Algebra. 6. Auflage. Cengage Lernen.
- Larson, r. 2006. Berechnung. 7. Auflage. Band 2. McGraw Hill.
- Salas, J. Lineare Algebra. Thema 10. Ortonormale Basen. Erholt von: ocw..Ist.
- Sevilla University. Zylindrische Koordinaten. Vektorbasis. Erholt von: Laplace.uns.Ist.
- Wikipedia. Ortonormale Basis. Geborgen von: ist.Wikipedia.Org.