

Rotationsbilanzformeln und Gleichungen, Beispiele, Übungen

- 4948
- 614
- Rieke Scheer
Es wird behauptet, dass sich ein ausgedehnter Körper befindet Rotationsbilanz Wenn die Summe der Drehmomente, die darauf reagieren, Null ist. Dies bedeutet nicht, dass das Objekt notwendigerweise in Ruhe ist, sondern dass es keinen Netto -Trend gibt, seinen Bewegungszustand in einen anderen zu ändern.
Ein Objekt, das sich mit konstanter Geschwindigkeit bewegt. Jetzt drehen sich Objekte, weil es Kräfte gibt, die auf sie so wirken, dass es sich um eine Rotation handelt. Die Fähigkeit einer Kraft, Rotation zu erzeugen, das als Drehmoment bezeichnet wird oder Torca, Es hängt nicht nur von der Intensität der Kraft ab, sondern auch, wo sie angewendet wird.
Abbildung 1. Die Aufhängungsbrücke der Figur wurde so konzipiert, dass sie sich im Rotationsgleichgewicht befindet. Quelle: Wikimedia Commons. Wir erkennen dies sofort, wenn sich eine geschlossene Tür öffnet.
Die Scharniere gehen an der Drehachse der Tür vorbei. Wenn man darauf besteht, es sehr nahe an den Scharnieren zu schieben.
In der Literatur ist das Drehmoment mit unterschiedlichen Namen: Moment der Torsion, Torsion, Moment einer Kraft und Torca. Alle sind Synonyme.
Wir müssen also die Drehmomente kennen, die auf ein Objekt wirken.
[TOC]
Rotationsbilanzzustand
Die Rotationsausgleichsbedingung lautet:
Die Summe aller Momente oder Drehmomente, die auf einen Körper wirken, der in Bezug auf jede Achse berechnet wird, muss nichtig sein.
Das fragliche Objekt muss erweitert werden.
Sie können Ihnen dienen: Newtons zweites Gesetz: Anwendungen, Experimente und ÜbungenAuf dem Körper können Kräfte angewendet werden und es gibt immer noch ein Rotationsbilanz, während die Kräfte ihn nicht drehen.
Es kann auch Bewegung geben, sogar beschleunigt, aber immer entlang einer geraden Linie, da nicht alle Kräfte das Erscheinungsbild von Drehmomenten verursachen. Diese erscheinen, wenn die Kräfte nicht ganz entlang derselben Handlungslinie handeln.
Drehmoment oder Moment der Kraft
Das Drehmoment wird mit den griechischen Texten bezeichnet τ, In fettgedruckte Schriftart Weil es ein Vektor ist und wir es von seiner Größe oder seinem Modul unterscheiden, was ein Skalar ist. Es hängt von der angewendeten Kraft ab F, des Vektors R die aus der Rotationsachse oder bis zum Anwendung der Kraft und schließlich aus dem Winkel zwischen diesen beiden Vektoren gerichtet ist.
Die richtige Beziehung zwischen diesen Größen wird durch das Vektorprodukt hergestellt:
τ = r X F
Und das Drehmomentmodul, das ohne kühn bezeichnet wird, ist:
τ = Rash Fashs θ
Wobei θ der Winkel zwischen ist R Und F. Drehmomenteinheiten sind im internationalen System einfach Nm.
In der Abbildung gibt es einen englischen Schlüssel, mit dem es beabsichtigt ist. Dafür werden zwei Kräfte versucht FZU Und FB.
FZU ist näher an o und hat einen Vektor RZU oder kürzerer Hebelarm produziert daher nicht so viel Drehmoment und Kraft FB, Das hat die gleiche Größe, aber es hat einen Vektor RB größer.
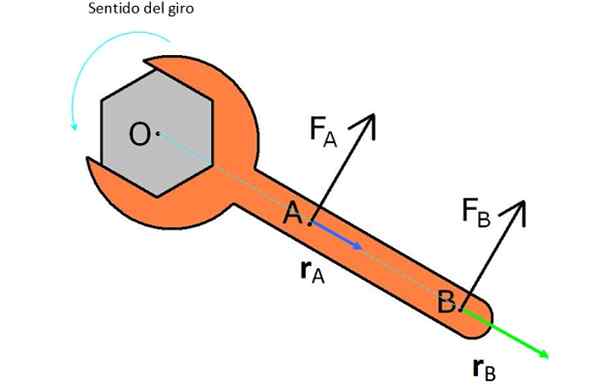 Figur 2. Kräfte und Arme, die auf einen englischen Schlüssel angewendet werden, um ihn gegen die Taktnadeln zu wenden. Quelle: Wikimedia Commons.
Figur 2. Kräfte und Arme, die auf einen englischen Schlüssel angewendet werden, um ihn gegen die Taktnadeln zu wenden. Quelle: Wikimedia Commons. Beachte.
Richtung und Gefühl des Drehmoments
Da das Drehmoment aus dem Kreuzprodukt zwischen Festigkeit und Positionsvektoren entsteht und diese in der Ebene des englischen Schlüssels liegen, muss das Drehmoment senkrecht zu dieser Ebene sein, dh zum Leser oder in der Seite gerichtet.
Kann Ihnen dienen: Atmosphärter Druck: Normalwert, wie er gemessen wird, BeispieleDurch Konvent.
Die Richtung und Richtung des resultierenden Drehmoments lassen sich leicht durch die unten gezeigte Regel der rechten Hand bestimmt:
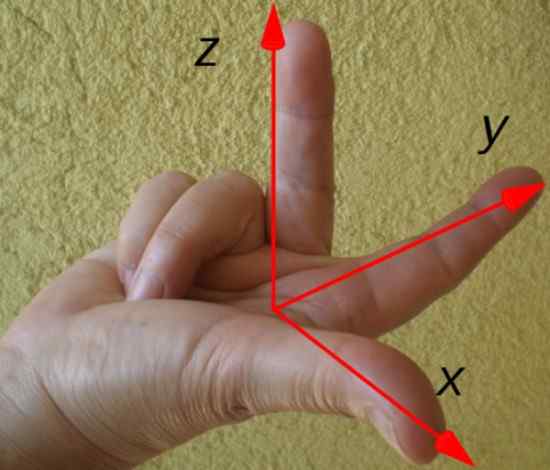 Figur 3. Rechtsregel, um die Richtung und Richtung des Troca zu bestimmen. Quelle: Wikimedia Commons.
Figur 3. Rechtsregel, um die Richtung und Richtung des Troca zu bestimmen. Quelle: Wikimedia Commons. Der Indexfinger zeigt nach dem Positionsvektor R, Der Mittelfinger nach Kraft F Und der Daumen signalisiert die Richtung und Richtung des Drehmoments τ. In diesem Beispiel wird das Drehmoment entlang der x -Achse gemäß der Zeichnung der Koordinatenachsen gerichtet.
Formeln und Gleichungen
Wenn die Drehmomente auf einen Körper wirken τ1, τ2, τ3… τYo, Das Netz oder das resultierende Drehmoment τN Es ist die Vektorsumme von allen:
τN = τ1+ τ2 + τ3 +.. τYo
Mit Summe der Summierung bleibt es übrig:
τN = ∑ τYo
Die Gleichgewichtsbedingung wird mathematisch wie folgt ausgedrückt:
τN = 0
Ach ja:
∑ τYo = 0
Wo das Drehmoment τ, In Bezug auf eine bestimmte O -Achse wird sie berechnet durch:
τ = r X F
Und wessen Größe ist:
τ = Rash Fashs θ
Beispiele
-Bei Menschen und Tieren ist Gewicht eine Kraft, die Drehmoment, Drehung und Sturz verursachen kann.
Die Menschen behaupten normalerweise eine solche Position, dass sie beim Gehen sie im Rahmen der Rotation einhält, es sei denn, Sportaktivitäten werden praktiziert, z.
-Zwei Kinder, die es geschafft haben, horizontal in der zu bleiben Rocker entweder auf und ab Sie sind im Rotationsgleichgewicht.
-Wenn die Untertassen des Gleichgewichts ausgeglichen sind, befindet sich das System im Rotationsgleichgewicht.
-Mitteilungen und Ampeln, die auf Straßen und Wegen hängen. Wenn die Kabel, die sie halten.
Es kann Ihnen dienen: Durchschnittliche Beschleunigung: Wie es berechnet und gelöst wird-Hängende Brücken wie Golden Gate in San Francisco und die Brücke von Abbildung 1.
Übung gelöst
Die von einer in der Figur gezeigte Stützstange ist sehr leicht. Die durch Unterstützung ausgeübte Kraft ist F und am Ende gilt die Kraft ZU.
Es wird gebeten, die Größen dieser Kräfte zu berechnen, wenn man bedenkt, dass sich das System im Gleichgewicht zwischen Übersetzung und Drehung befindet.
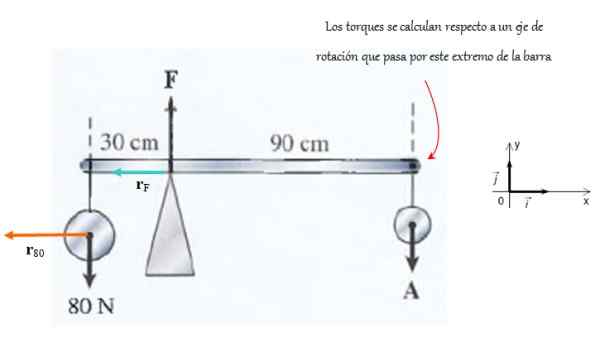 Figur 4. Auf dieser Barkräfte wirken sie so, dass es im Rotationsgleichgewicht bleibt. Quelle: f. Zapata.
Figur 4. Auf dieser Barkräfte wirken sie so, dass es im Rotationsgleichgewicht bleibt. Quelle: f. Zapata. Lösung
Da sich das System nicht bewegt, wird die Kräftesumme abgesagt. Alle sind vertikal und Sie können mit den Größen arbeiten. Der positive Sinn ist auf und der negative Abstand: deshalb:
F - 80 - a = 0
Jetzt wird der Rotationsgleichgewichtszustand angewendet, für den Sie eine willkürliche Rotationsachse wählen müssen. In diesem Fall wird es am Ende rechts ausgewählt, damit der Vektor RZU Sei null, auf diese Weise das Drehmoment, das von ausgeübt wird ZU, aber nur die von denen von F und die Stärke der Linken.
Das Drehmoment von F Es ist gemäß der Regel der rechten Hand und dem gezeigten Koordinatensystem:
τF = RF X F = 0.9 f (-k) N.M
Es ist auf dem Bildschirm gerichtet und hat ein negatives Zeichen. Während das durch die Kraft von 80 N erzeugte Drehmoment:
τ = 80 x 1.zwanzig (k) Núm = 96 (k) Nm
Dieses Drehmoment wird aus dem Bildschirm gerichtet und ein positives Zeichen zugewiesen. Da gibt es eine Rotationsbilanz:
96 - 0.900 = 0
Die Größe von F Ist:
F = (96/0.9) n = 106.7 n
Und da sich das System in Übersetzungsbilanz befindet, wird die Summe der Kräfte abgebrochen. Dies ermöglicht es uns, die Größe von zu löschen ZU:
F - a - 80 n = 0
Deshalb:
A = 106.7 - 80 n = 26.7 n.
Verweise
- Rex, a. 2011. Grundlagen der Physik. Pearson.
- Serway, r., Jewett, J. (2008). Physik für Wissenschaft und Ingenieurwesen. Band 1. 7. Ed. Cengage Lernen.
- Sears, Zemansky. 2016. Universitätsphysik mit moderner Physik. 14. Ed. Band 1. Pearson.
- Tipler, p. (2006) Physik für Wissenschaft und Technologie. 5. ed. Band 1. Redaktion zurückgekehrt.
- Tippens, p. 2011. Physik: Konzepte und Anwendungen. 7. Ausgabe. McGraw Hill.