

Bestimmung des Translationsausgleichs, Anwendungen, Beispiele

- 3068
- 92
- Joy Hort
Er Übersetzungsbilanz Es ist ein Zustand, in dem ein Objekt als Ganzes ist, wenn alle darauf einwirkten Kräfte kompensiert werden, was zu einer Hohlraumkraft führt. Mathematisch ist es gleichwertig zu sagen, dass f1+ F2 + F3 +.. . = 0, sein f sein1, F2, F3... die beteiligten Kräfte.
Die Tatsache, dass sich ein Körper im translationalen Gleichgewicht befindet, bedeutet nicht, dass er notwendigerweise in Ruhe ist. Dies ist ein besonderer Fall der vorherigen Definition. Das Objekt kann in Bewegung sein, aber ohne Beschleunigung wird dies eine gleichmäßige geradlinige Bewegung sein.
Abbildung 1. Das Übersetzungsgleichgewicht ist für eine große Anzahl von Sportarten wichtig. Quelle: Pixabay. Also, wenn der Körper in Ruhe geht. Und wenn Sie bereits Bewegung haben, wird es eine konstante Geschwindigkeit haben. Im Allgemeinen ist die Bewegung eines Objekts eine Zusammensetzung von Übersetzungen und Rotationen. Übersetzungen können wie in Abbildung 2 dargestellt sein: linear oder krummlinig.
Wenn jedoch einer der Punkte des Objekts festgelegt ist, besteht die einzige Möglichkeit, sich zu bewegen, zu drehen. Beispiel hierfür ist eine CD, deren Mitte festgelegt ist. Die CD hat die Möglichkeit, sich um eine Achse zu drehen, die diesen Punkt durchläuft, sich aber nicht bewegen kann.
Wenn Objekte feste Punkte haben oder auf Oberflächen unterstützt werden, wird davon gesprochen Links. Die Links interagieren, die die Bewegungen einschränken, die das Objekt ausführen kann.
[TOC]
Bestimmung des Übersetzungsgleichgewichts
Für ein Teilchen im Gleichgewicht ist es gültig, um sicherzustellen:
FR = 0
Oder in summarischer Notation:
Es ist klar, dass die Kräfte, die darauf einwirken, in irgendeiner Weise entschädigt werden müssen, damit sein Ergebnis für nichtig ist, damit ein Körper in der translationalen Gleichheit eingeht, so dass sein Ergebnis für nichtig ist.
Auf diese Weise erlebt das Objekt keine Beschleunigung und alle seine Partikel sind in Ruhe oder experimieren geradlinige Übersetzungen mit konstanter Geschwindigkeit.
Es kann Ihnen dienen: Theorie des Urknalls: Merkmale, Stufen, Beweise, ProblemeWenn sich Objekte nun drehen können, werden sie es im Allgemeinen tun. Deshalb bestehen die meisten Bewegungen aus Übersetzungs- und Rotationskombinationen.
Drehung eines Objekts
Wenn die Rotationsbilanz wichtig ist, kann es erforderlich sein, sicherzustellen, dass sich das Objekt nicht dreht. Dann muss man studieren, ob Drehmomente oder Momente darauf reagieren.
Das Drehmoment ist die Vektorgröße, von der die Rotationen abhängen. Erfordert, dass eine Kraft angewendet wird, aber der Antragsgrund ist auch wichtig. Um die Idee zu klären, betrachten Sie ein erweitertes Objekt, auf das eine Kraft handelt F Und sehen wir sehen, ob Sie in der Lage sind, eine Rotation in Bezug auf eine Achse zu erzeugen oder.
Es ist bereits intuitiert, dass durch Drücken des Objekts an Punkt P mit der Kraft F, Es ist möglich, den Punkt O mit einer anti -Horary -Richtung umzudrehen. Aber die Richtung, in die Kraft angewendet wird, ist auch wichtig. Zum Beispiel kann die in der Abbildung des Mediums angewendete Kraft das Objekt nicht drehen, obwohl es es sicherlich bewegen kann.
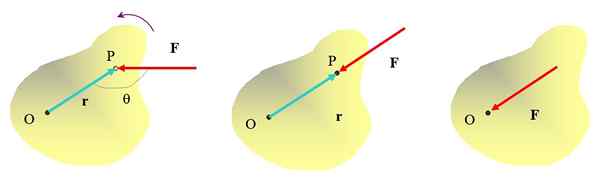 Figur 2. Verschiedene We. Quelle: Selbst gemacht.
Figur 2. Verschiedene We. Quelle: Selbst gemacht. Wenden Sie Kraft direkt am Punkt an oder wird auch nicht verwendet, um das Objekt zu drehen. Anschließend ist klar, dass die Kraft, um einen Rotationseffekt zu erzielen.
Definition des Drehmoments
Das Drehmoment oder das Moment einer Kraft, die als τ der Vektorgröße bezeichnet wird, die für die Zusammenstellung all dieser Tatsachen verantwortlich ist, wird definiert als:
τ = r x f
Der Vektor R Es ist von der Drehachse bis zur Anwendung der Kraft gerichtet, und die Beteiligung des Winkels zwischen R und F ist wichtig. Daher wird die Größe des Drehmoments als:
Kann Ihnen dienen: Newtons erstes Gesetz: Formeln, Experimente und Übungenτ = r.F.Sen Q
Das effektivste Drehmoment findet statt, wenn R Und F Sie sind senkrecht.
Wenn nun gewünscht wird, dass es keine Rotationen oder diese mit einer konstanten Winkelbeschleunigung gibt, ist es notwendig, dass die Summe der auf das Objekt wirkenden Drehmomente null ist und analog zu dem, was für die Kräfte in Betracht gezogen wurde:
Gleichgewichtsbedingungen
Gleichgewicht bedeutet Stabilität, Harmonie und Gleichgewicht. Damit die Bewegung eines Objekts diese Eigenschaften besitzt, müssen die in den vorherigen Abschnitten beschriebenen Bedingungen angewendet werden:
1) f1+ F2 + F3 +.. . = 0
2) τ1+ τ2 + τ3 +.. . = 0
Die erste Bedingung garantiert die Translationsbilanz und das zweite die Rotation. Beide müssen erfüllt sein, wenn das Objekt in der Option bleiben soll statisches Gleichgewicht (Fehlen einer Bewegung jeglicher Art).
Anwendungen
Die Gleichgewichtsbedingungen gelten für zahlreiche Strukturen, da bei der Erstellung von Gebäuden oder verschiedenen Objekten die Absicht hergestellt wird, dass ihre Teile in denselben relativen Positionen miteinander aufrechterhalten werden. Mit anderen Worten, dass das Objekt nicht entwaffnet ist.
Dies ist zum Beispiel wichtig, wenn Sie Brücken bauen, die fest unter ihren Füßen bleiben, oder bei der Gestaltung bewohnbarer Strukturen, die sich nicht ändern oder die Tendenz zum Ableiten haben.
Während es angenommen wird, dass die gleichmäßige geradlinige Bewegung eine extreme Vereinfachung der Bewegung ist, die normalerweise wenig in der Natur auftritt betrachtet homogen für die Umwelt.
In vielen mobilen Strukturen des Menschen ist es wichtig, dass eine konstante Geschwindigkeit beibehalten wird: zum Beispiel auf mechanischen Treppen und Montagelinien.
Es kann Ihnen dienen: Zweites Gesetz der Thermodynamik: Formeln, Gleichungen, BeispieleBeispiele für translationale Gleichgewicht
Dies ist die klassische Übung von Spannungen, die die Lampe im Gleichgewicht halten. Es ist bekannt, dass die Lampe 15 kg wiegt. Finden Sie die Größen der notwendigen Spannungen, um sie in dieser Position zu halten.
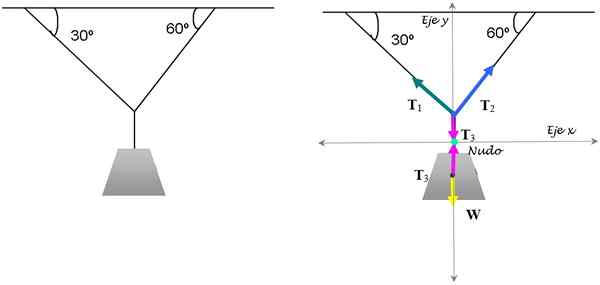 Figur 3. Der Lampenbilanz wird garantiert, indem die Übersetzungsbilanzbedingung angewendet wird. Quelle: Selbst gemacht.
Figur 3. Der Lampenbilanz wird garantiert, indem die Übersetzungsbilanzbedingung angewendet wird. Quelle: Selbst gemacht. Lösung
Um es zu lösen, konzentrieren wir uns auf den Knoten, in dem die drei Saiten zusammenkommen. Die jeweiligen freien Körperdiagramme für den Knoten und für die Lampe sind in der obigen Abbildung dargestellt.
Das Gewicht der Lampe ist W = 5 kg . 9.8 m/s2 = 49 n. Damit die Lampe im Gleichgewicht ist, ist es genug, dass die erste Balance -Bedingung erfüllt ist:
T3 - W = 0
T3 = W = 49 n.
Spannungen T1 Und T2 Sie müssen sich zersetzen:
T1y + T2 und - T3 = 0 (Sommer der Kräfte entlang der Y -Achse)))
-T1x +T2x = 0 (Sommer der Kräfte entlang der X -Achse)
Anwendung von Trigonometrie:
T1.Cos 60º +t2 .Cos 30º = 49
- T1.sen60º +t2.Sen30º = 0
Es ist ein System von zwei Gleichungen mit zwei Unbekannten, deren Antwort lautet: T1 = 24.5 n Und T2 = 42.4 n.
Verweise
- Rex, a. 2011. Grundlagen der Physik. Pearson. 76 - 90.
- Serway, r., Jewett, J. (2008). Physik für Wissenschaft und Ingenieurwesen. Band 1. 7ma. Ed. Cengage Lernen. 120 - 124.
- Serway, r., Vulle, c. 2011. Grundlagen der Physik. 9n / A Ed. Cengage Lernen. 99-112.
- Tippens, p. 2011. Physik: Konzepte und Anwendungen. 7. Ausgabe. MacGraw Hill. 71 - 87.
- Walker, J. 2010. Physik. Addison Wesley. 332 -346.