

Dynamischer oder kinetischer Reibungskoeffizient, Beispiele, Übungen
- 3240
- 592
- Joe Hartwig
Der Dynamische Reibung oder kinetisch Es ist das eine, der zwischen zwei in Kontakt stehen, wenn sich die Oberfläche eines von ihnen in Bezug auf die Oberfläche des anderen bewegt. Zum Beispiel ist in einer Schachtel, die die Reibung an einer Steigung gleitet, dynamisch und auf der Kontaktfläche des Blocks verteilt.
Die Neigung muss groß genug sein, so dass die tangentiale Komponente des Gewichts die Reibungskraft entspricht oder überwindet, sonst würde der Block, der absteigt.
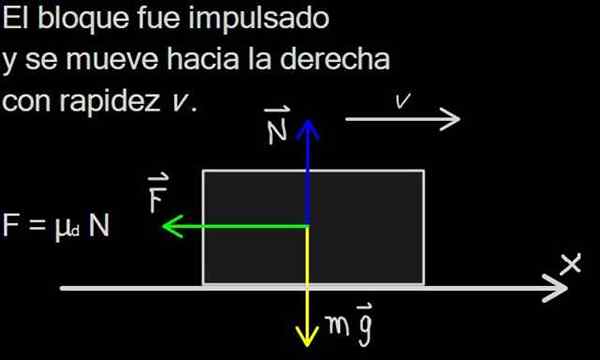
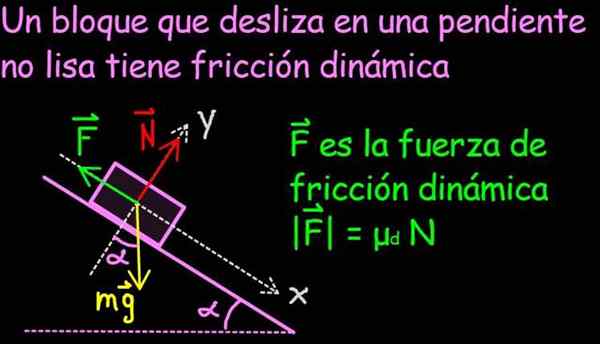 Abbildung 1. Die Reibungskraft wird auf der Kontaktfläche des Blocks verteilt, aber im Kräftediagramm wird sie als einzelne Kraft F, Quelle: F dargestellt. Zapata
Abbildung 1. Die Reibungskraft wird auf der Kontaktfläche des Blocks verteilt, aber im Kräftediagramm wird sie als einzelne Kraft F, Quelle: F dargestellt. Zapata Die Reibungskraft ist im täglichen Leben von extremer Bedeutung, da sie die Fortbewegung von Menschen, Tieren und Fahrzeugen ermöglicht. Auf einer reibungslosen Oberfläche wie der eines Eiss ist es nicht möglich, die Bewegung zu beginnen.
Die Reibung ermöglicht es unseren Autos auch, zu stoppen, sobald sie bewegt werden.
Beim Auftragen der Bremsen werden Bremsbeläge gegen Radscheiben festgezogen und dank der dynamischen Reibung die Drehung von ihnen stoppen. Aber es reicht nicht aus, gute Bremsen zu haben. Es ist notwendig, dass zwischen den Reifen und dem Boden genügend Reibigkeit besteht.
Die Menschheit hat gelernt, mit Reibung zu ihrem Vorteil umzugehen. So begann mit der Verwendung von Reibung zwischen zwei Teilen trockenes Holz, um Feuer zu machen.
Die Natur hat auch gelernt, mit Reibung zu ihren Gunsten umzugehen. Zum Beispiel sind die Synovialmembranen, die die Knochen der Gelenke bedecken.
[TOC]
Dynamischer Reibungskoeffizient
Der erste, der die Bewegung eines Blocks systematisch untersuchte, der auf einer flachen Oberfläche gleitet, war Leonardo da Vinci, aber seine Studien blieben unbemerkt.
Kann Ihnen dienen: Dirac Jordan Atomic Model: Merkmale und PostulateErst im 17. Jahrhundert entdeckte der französische Physiker Guillaume Amontons die Reibungsgesetze wieder:
Dynamische Reibungsgesetze
1.- Die in einem Block vorhandene Reibungskraft, die auf einer flachen Oberfläche gleitet, widerspricht immer der Bewegungsrichtung.
2.- Die Größe der dynamischen Reibungskraft ist proportional zur normalen Enge oder Kraft zwischen den Oberflächen des Blocks und der Stützebene.
3.- Die Proportionalkonstante ist der Reibungskoeffizient, statisches μUnd Im Falle eines Slips und dynamischen μD Wenn es gibt. Der Reibungskoeffizient hängt von den Materialien der Kontaktoberflächen und dem Rauheitszustand ab.
4.- Die Reibungskraft ist unabhängig von der scheinbaren Kontaktfläche.
5.- Sobald die Bewegung einer Oberfläche in Bezug auf die andere beginnt, ist die Reibungskraft konstant und hängt nicht von der relativen Geschwindigkeit zwischen den Oberflächen ab.
In dem Fall gibt es kein gleitendes, statischer Reibung, dessen Kraft geringer ist als oder gleich dem statischen Reibungskoeffizienten multipliziert mit Normalen.
Figur 2. Die dynamische Reibungskraft widersetzt sich der Bewegungsrichtung und ihre Größe ist proportional zu der der Normalkraft. Die Verhältnismäßigkeitskonstante ist der dynamische Reibungskoeffizient. Quelle: f. Zapata. Das letzte Grundstück war das Ergebnis des Beitrags des französischen Physikers Charles Augustin von Coulomb, der besser für sein berühmtes Kraftgesetz zwischen spezifischen elektrischen Gebühren bekannt ist.
Diese Beobachtungen führen uns zum mathematischen Modell für dynamische Reibungskraft F:
F = μD N
Wo μD Es ist der dynamische Reibungskoeffizient und N ist die normale Kraft.
Wie Sie den dynamischen Reibungskoeffizienten bestimmen?
Der dynamische Reibungskoeffizient zwischen zwei Oberflächen wird experimentell bestimmt. Sein Wert hängt nicht nur von den Materialien auf beiden Oberflächen ab, sondern auch von dem Zustand der Rauheit oder des Polierens, das sie haben, sowie von seiner Sauberkeit.
Kann Ihnen dienen: Mechanische Wellen: Eigenschaften, Eigenschaften, Formeln, TypenEine Möglichkeit, zu bestimmen, besteht darin, eine bekannte Box auf eine horizontale Oberfläche zu steigern und zu schieben.
Wenn die Geschwindigkeit zum Zeitpunkt der Fahrt bekannt ist und die von dieser Zeit zurückgelegte Strecke gemessen wird, ist es möglich, die Bremsbeschleunigung aufgrund dynamischer Reibung zu kennen.
Experiment
In diesem Experiment wird die Anfangsgeschwindigkeit gemessen v und die Entfernung D, Die Bremsbeschleunigung ist also:
A = - v2 / 2d
Das Kräftediagramm ist in Abbildung 2 dargestellt. Die Größe des Gewichts ist die Masse m des Blocks multipliziert mit der Beschleunigung der Schwerkraft G, und wie bekannt ist, zeigt das Gewicht immer vertikal nach unten.
N Es ist die normale Kraft aufgrund des Aufschubs der Stützoberfläche und ist immer senkrecht (oder normal) zur Ebene. Normal existiert, während die Oberflächen in Kontakt sind und aufhören, sobald die Oberflächen getrennt sind.
Die Kraft F repräsentiert die dynamische Reibungskraft. Es ist tatsächlich auf der unteren Oberfläche des Blocks verteilt, aber wir können es als einzelne Kraft darstellen F in der Mitte des Blocks angewendet.
Da es vertikales Gleichgewicht gibt, ist die Größe des Normalwerts N Es entspricht dem des Gewichts mg:
N = mg
In horizontaler Richtung erzeugt die Reibungskraft die Verzögerung des Massenblocks M gemäß Newtons zweitem Gesetz:
-F = m a
Die Reibungskraft F Punkte nach links, so dass seine horizontale Komponente negativ ist, m ist die Masse des Blocks und A die Bremsbeschleunigung.
Hatte zuvor erhalten A = - v2 / 2d Und auch das dynamische Reibungsmodell zeigt Folgendes an:
F = μd n
Ersetzen in der vorherigen Gleichung, die Sie haben:
-μD N = - v2 / 2d
Unter Berücksichtigung dieser n = mg können Sie bereits den dynamischen Reibungskoeffizienten löschen:
Kann Ihnen dienen: Schrödinger Atomic ModelμD = v2 / (2d mg)
Rocy -Koeffiziententabelle einiger Materialien
Die folgende Tabelle zeigt die statischen und dynamischen Reibungskoeffizienten für verschiedene Materialien. Es ist zu beachten, dass systematisch der statische Reibungskoeffizient immer größer ist als der dynamische Reibungskoeffizient.
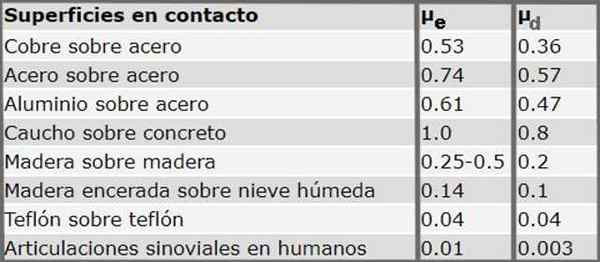 Figur 3. Statische und dynamische Reibungskoeffizienten für mehrere Kontaktflächen in Kontakt. Quelle: Serway R.ZU. Physisch. McGraw-Hill (1992)
Figur 3. Statische und dynamische Reibungskoeffizienten für mehrere Kontaktflächen in Kontakt. Quelle: Serway R.ZU. Physisch. McGraw-Hill (1992) Übungen
- Übung 1
Ein 2 -kg -Teigblock auf einem horizontalen Boden wird befördert und freigelassen. Zum Zeitpunkt der Veröffentlichung wird eine Geschwindigkeit von 1,5 m/s aufgezeichnet. Von diesem Moment bis der Block nach dynamischer Reibung 3 m anhält. Bestimmen Sie den kinetischen Reibungskoeffizienten.
Lösung
Gemäß der im Beispiel des vorherigen Abschnitts erhaltenen Formel ist es der dynamische (oder kinetische) Koeffizient ist:
μD = v2 / (2d mg) = 1.52 / (2x3x2 x9.8) = 0,019.
- Übung 2
Zu wissen, dass der Block in Abbildung 1 mit konstanter Geschwindigkeit herabsteigt, dass die Masse des Blocks 1 kg beträgt und dass die Neigung der Ebene 30 ° beträgt, bestimmt:
a) Der Wert der dynamischen Reibung
b) Der dynamische Reibungskoeffizient zwischen Block und Ebene.
Lösung
In Abbildung 4 ist die Bewegungsgleichung (zweites Gesetz von Newton) für das Problem eines Blocks gezeigt, der eine Steigung mit Reibungskoeffizienten μ steigtD und α -Neigung (siehe Kräftediagramm in Abbildung 1)
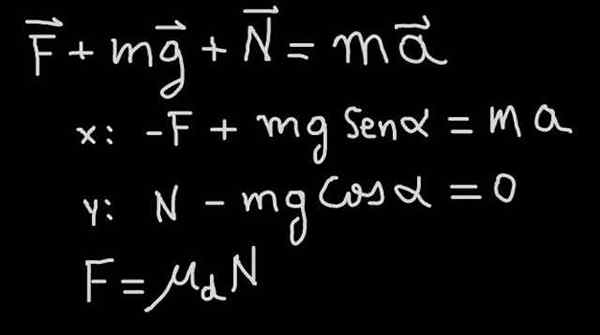 Figur 4. Newtons zweites Gesetz galt für den Block, der mit Reibung auf einem Hang gleitet. Quelle: f. Zapata.
Figur 4. Newtons zweites Gesetz galt für den Block, der mit Reibung auf einem Hang gleitet. Quelle: f. Zapata. In unserer Übung wird uns mitgeteilt, dass der Block mit konstanter Geschwindigkeit abfällt und daher mit Beschleunigung a = 0 herabsteigt. Von dort aus folgt die Reibungskraft so, dass sie der tangentialen Komponente des Gewichts entspricht: f = mg sen (α).
In unserem Fall M = 1 kg und α = 30º, so dass die Reibungskraft F einen Wert von 4,9n hat.
Andererseits ist die Normalkraft N dieselbe und entgegen der senkrechten Komponente des Gewichts: n = mg cos (α) = 8,48n .
Von dort aus folgt der dynamische Reibungskoeffizient:
μD = F / n = 4,9n / 8,48n = 0,57
Verweise
- Alonso m., Finn e. 1970. Physisch. Volumen I. Mechanik. Inter -American Educational Fund s s.ZU.
- Bauer, w. 2011. Physik für Ingenieurwesen und Wissenschaften. Band 1. Mc Graw Hill.
- Hewitt, p. 2012. Konzeptionelle Physik. FÜNFTE AUSGABE.
- Rex, a. 2011. Grundlagen der Physik. Pearson.
- Serway r. 1992. Physisch. McGraw-Hill.
- Jung, h. 2015. Universitätsphysik mit moderner Physik. 14. ed. Pearson.
- « Phosphatidylcholin -Synthese, Struktur, Funktionen, Eigenschaften
- Rohstofflagerfunktionen, wofür es, Beispiel »