

Vektorfunktionen
- 1962
- 401
- Medine Kedzierski
Was sind Vektorfunktionen??
A Vektorfunktion eines Parameters T, Es ist eine Funktion, deren Domäne die realen Werte von sind T, Während die Route durch Vektoren der Form gebildet wird R (T). Eine solche Funktion kann ausgedrückt werden als:
R (T) = f (T) Yo + G (T) J + H (T) k
Wo Yo, J Und k Sie sind die Einheitsvektoren in den drei Hauptrichtungen des Raums, und die Funktionen F, G und H sind reale Funktionen der Variablen T. Die Notation nutzt fett, um die Vektorgrößen zu unterscheiden.
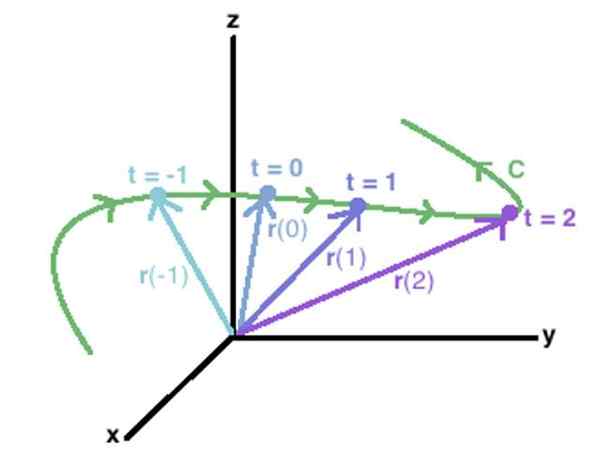 Eine Vektorfunktion im Raum kann verwendet werden, um eine C -Kurve zu beschreiben, wobei die extremen Punkte jedes der durch diese Funktion bestimmten Vektoren verbinden. Quelle: Wikidot.
Eine Vektorfunktion im Raum kann verwendet werden, um eine C -Kurve zu beschreiben, wobei die extremen Punkte jedes der durch diese Funktion bestimmten Vektoren verbinden. Quelle: Wikidot. Eine andere Möglichkeit, eine Vektorfunktion zu bezeichnen, ist über quadratische Klammern:
R (T) =
Vektorfunktionen können verwendet werden, um Kurven in Ebene und Raum zu untersuchen, z. B. die Flugbahn, die einem sich bewegenden Objekt folgt. Ein Beispiel ist das Gleichnis, das von einem projizierten Ball mit anfänglicher Geschwindigkeit unter Schwerkraft beschrieben wird.
Wenn Sie in jedem Moment die Position des Balls kennenlernen möchten T, Die Vektorfunktion mit zwei Komponenten, einer horizontalen und einer vertikalen: eine vertikale:
R (T) = x (T) Yo + Und(T) J
Beide x (T) als y ((T) Sie sind Zeitfunktionen T. So beitragen Sie die extremen Punkte der einzelnen Vektoren R(T) Möglich, bilden Sie das von der Kugel im Flugzeug beschriebene Gleichnis Xy.
Das Konzept erstreckt sich leicht auf eine C -Kurve im Raum, wie beispielsweise das in der obigen Abbildung gezeigte. Vektoren erscheinen darin R (-1), R (0), R (1) R (2), deren Enden die C -Kurve zeichnen, gezeichnet in grün.
Grenzen, abgeleitet und integral von Vektorfunktionen
Berechnungswerkzeuge, die für reale variable Funktionen gelten, können auch auf Vektorfunktionen angewendet werden.
Kann Ihnen dienen: FaktorisierungGrenze einer Vektorfunktion
Die Vektorfunktionsgrenze R (T) = f (T) Yo + G (T) J + H (T) k, Wenn T → A, ist es definiert als:
=\left%20[%20\displaystyle%20\lim_%20t\to%20a%20f(t)\right%20]\textbfi+\left%20[%20\displaystyle%20\lim_%20t\to%20a%20g(t)\right%20]\textbfj+\left%20[%20\displaystyle%20\lim_%20t\to%20a%20h(t)\right%20]\textbfk)
Angenommen, es gibt die jeweiligen Grenzen von F (T), G (T) und h (T), Wenn T → a.
Abgeleitet von einer Vektorfunktion
Die Definition von einer Vektorfunktion abgeleitet R (t) = f (T) Yo + G (T) J + H (T) k Es ist analog zu der der Ableitung einer realen Funktion der realen Variablen. Berufung R'(t) zu diesem Derivat haben Sie:
=\displaystyle%20\lim_\Delta%20t%20\to%200\frac\mathbfr(t+\Delta%20t)-\mathbfr(t)\Delta%20t)
Das Derivat existiert, wenn die vorherige Grenze existiert, und wenn ja, die Funktion R(T) ist differenzierbar in T.
Integral einer Vektorfunktion
Sei R (t) = f (T) Yo + G (T) J + H (T) k eine Vektorfunktion, so dass Funktionen F, G und H in integrierbar sind T.
So:
dt%20=\left%20[%20\int%20f(t)dt%20\right%20]\mathbfi+\left%20[%20\int%20g(t)dt%20\right%20]\mathbfj+\left%20[%20\int%20h(t)dt%20\right%20]\mathbfk+\mathbfC)
Mit:
C = c1 Yo + C2 J
Dies bedeutet, dass die Integrationskonstante auch ein Vektor ist, aber konstant.
Beispiele für Vektorfunktion
Beispiel 1
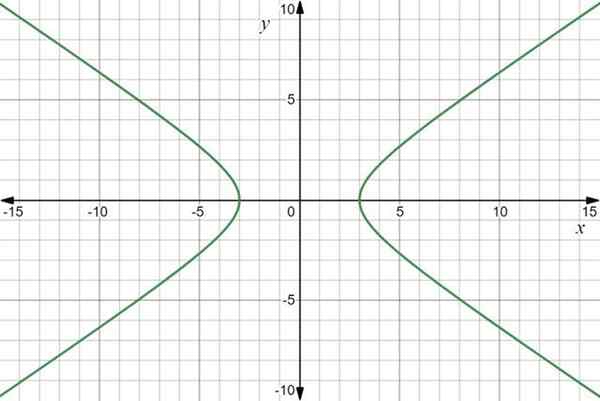
Sie haben die Vektorfunktion durch R (T) = 3sec T Yo + 2tan T J. Es ist möglich, es für verschiedene t -Werte wie t = π/4 und t = π zu bewerten, was zu Vektoren führt R (π/4) und R (π):
R (π/4) = 3Sec (π/4) Yo + 2tan (π/4) J = 3√2 Yo + 2 J
R (π) = 3Sec (π) Yo+2tan (π) J = - 3 Yo
Jedoch, R (T) Es existiert nicht für Werte von t = ∓π/2, ∓3π/2, ∓5π/2…, da die SEC -Funktion die SEC -Funktion T = 1 /cos T Es ist nicht definiert, auch so ist es so T = sen T / cos T.
Daher ist die Domäne der R (T) -Funktion alle realen Werte von T, außer denen der Form:
∓ (2n+1) π/2; Mit n = 0, 1, 2, .. .
Die Grafik der Funktion ist eine Hyperbel:
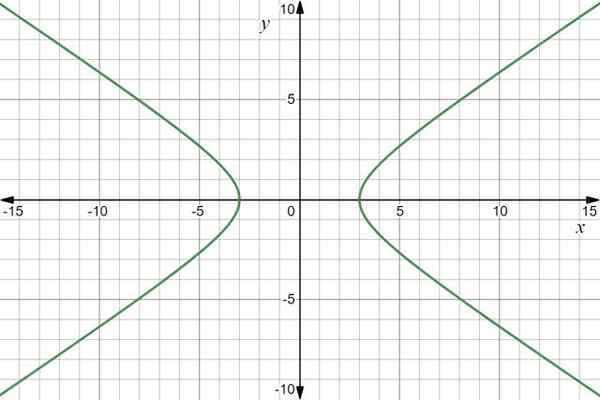 Vektorfunktionsgrafik R (t) = 3Sec t Yo+2 Tan T J. Quelle: f. Zapata durch Desmos.
Vektorfunktionsgrafik R (t) = 3Sec t Yo+2 Tan T J. Quelle: f. Zapata durch Desmos. Beispiel 2
Im geneigten Projektilstart ist die mobile Position die Vektorfunktion R (T) = x (T) Yo + Und(T) J . Unter der Annahme, dass Luftwiderstand nicht eingreift und dass die Schwerkraft die einzige Kraft ist, die auf das Mobile wirkt.8 m/s2 Der Beschleunigungswert. Diese Beschleunigung ist vertikal gegenüber dem Boden.
Kann Ihnen dienen: Ableitung Regeln (mit Beispielen)In diesem Fall die Funktionen x (T) Und (T) Sie sind jeweils:
- x (t) = xentweder + vOchse∙ t
- und (t) = yentweder + vOy∙ T - ½ GT2
Die Beträge vOchse und vOy Sie sind die Komponenten der Vektorfunktion, die die mobile Geschwindigkeit jederzeit beschreibt:
v (T) = vX(T) Yo + vUnd(T) J
Mit:
- vOchse = ventweder∙ cos θ
- vOy = ventweder∙ Sen θ
Θ ist der Winkel, der die Anfangsgeschwindigkeit in Bezug auf die Horizontale bildet.
Die anfängliche Position des Mobiltelefons ist der Koordinatenpunkt (xentweder,Undentweder) oder gleichwertig der Positionsvektor gegeben durch:
Rentweder (T) = xentweder Yo + Undentweder J
Beachten Sie, dass in den gezeigten Gleichungen ein negatives Vorzeichen der vertikalen Richtung zugeordnet wurde, sodass der dritte Term der Gleichung für y (t) es nimmt. Es ist auch möglich, den Ursprung der Anfangsposition des Handys zuzuordnen.
Sofortgeschwindigkeit des Projektils
Die momentane Geschwindigkeit V (t) ist die erste aus der Position, die in Bezug auf die Zeit abgeleitet ist. Es wird berechnet, indem die bekannten Ableitungsregeln angewendet werden:
v(t) = R ' (T) = [x (T) Yo + Und(T) J]'= X '(T) Yo + Und'(T) J = vOchse Yo + (vOy - Gt) J
Das Geschwindigkeitsmodul ist gegeben durch:

Sofortige Beschleunigung des Projektils
Es ist bekannt, dass es G in vertikaler Richtung und Richtung nach unten ist. Dies wird verifiziert und weiß, dass die Beschleunigung das erste Abgang der Geschwindigkeit in Bezug auf die Zeit (oder die zweite Ableitung der Position in Bezug auf die Zeit, falls bevorzugt):
Zu(t) = V ' (T) = [VOchse Yo + (vOy - Gt) J] '= [VOchse Yo] '+ [(vOy - Gt) J] '= = - g J
Dies ist genau das erwartete Ergebnis.
Übung gelöst
Angesichts der Vektorfunktion R (T) = 3t Yo + (T - 1) J, finden R '(t) und R "(T).
Lösung
Wenn Sie die Ableitungsregeln auf jede der Komponenten anwenden, haben Sie:
Kann Ihnen dienen: Integrationskonstante: Bedeutung, Berechnung und BeispieleR '(t) = = 3 Yo + J
Und da die Ableitung einer Konstante 0 ist:
R "(t) = 0
Das heißt, R "(t) ist gleich dem Nullvektor.
Verweise
- Figueroa, d. 2005. Serie: Physik für Wissenschaft und Ingenieurwesen. Band 1. Kinematik. Herausgegeben von Douglas Figueroa (USB).
- Larson, r. Berechnung mit analytischer Geometrie. 2. Auflage. McGraw Hill.
- Mathonline. Vektorwerte Funktionen. Erholt von: Mathonline.Wikidot.com.
- Opentax. Kalkül Volume 3. Abgerufen von: openStax.Org.
- Purcell, e. J. 2007. Berechnung. Pearson Ausbildung.