

Vektoralgebra
- 3427
- 468
- Timo Rabenstein
Was ist die Vektoralgebra??
Er Vektoralgebra Es handelt sich. Es bezieht sich auf Bereiche wie Engineering, Auflösung von Differentialgleichungen, Funktionsanalyse, Operationsforschung, Computergrafik unter anderem.
Ein weiterer Bereich, den die lineare Algebra übernommen hat. Dies hat ein besseres Verständnis des Universums ermöglicht.
Grundlagen
Die Vektoralgebra stammt aus der Untersuchung der Quaternionen (Erweiterung der realen Zahlen) 1, I, J und K sowie der von Gibbs und Heaviside geförderten kartesischen Geometrie, die erkannten, dass die Vektoren als Instrument dienen würden, um darzustellen mehrere physikalische Phänomene.
Die Vektoralgebra wird durch drei Fundamente untersucht:
Geometrisch
Die Vektoren werden durch Linien dargestellt, die eine Orientierung haben, und Operationen wie Summe, Subtraktion und Multiplikation durch reelle Zahlen werden durch geometrische Methoden definiert.
Analytisch
Die Beschreibung der Vektoren und deren Operationen erfolgt mit Zahlen, die als Komponenten bezeichnet werden. Diese Art von Beschreibung ist das Ergebnis einer geometrischen Darstellung, da ein Koordinatensystem verwendet wird.
Axiomatisch
Eine Beschreibung der Vektoren wird unabhängig vom Koordinatensystem oder jeglicher Art von geometrischer Darstellung erstellt.
Die Untersuchung von Zahlen im Raum erfolgt durch seine Darstellung in einem Referenzsystem, das sich in einer oder mehreren Dimensionen befinden kann. Zu den Hauptsystemen gehören:
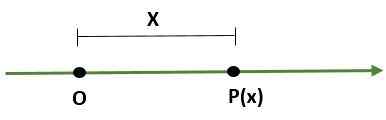
- Eindimensionales System, dass es eine Linie ist, an der ein Punkt (OR) den Ursprung darstellt und ein anderer Punkt (p) die Skala (Länge) und die Richtung davon bestimmt:
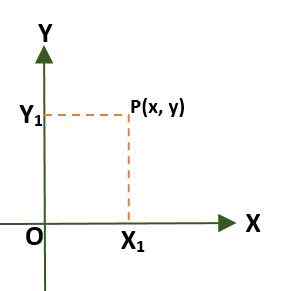
- Rechteckiges Koordinatensystem (zwei -dimensionale), die aus zwei senkrechten Linien bestehen, die als X- und Y -Achse bezeichnet werden und durch einen Punkt (oder) Ursprung fließen; Auf diese Weise ist der Plan in vier Regionen unterteilt, die Quadranten genannt werden. In diesem Fall wird ein Punkt (p) in der Ebene durch die Abstände gegeben, die zwischen den Achsen und P bestehen.
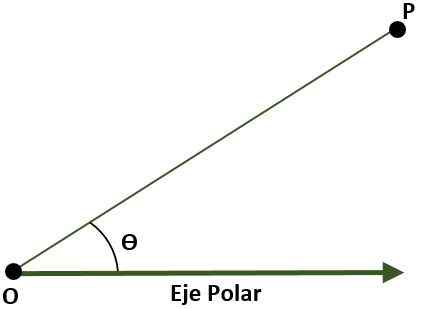
- Polarkoordinatensystem (zwei -dimensionale). In diesem Fall besteht das System aus einem Punkt O (Ursprung), der als Pol und ein Semi -River mit Ursprung in oder als polare Achse bezeichnet wird. In diesem Fall wird der Punkt P der Ebene unter Bezugnahme auf den Pol und die polare Achse durch den Winkel (ɵ) gegeben, der durch den Abstand zwischen dem Ursprung und dem Punkt P gebildet wird.
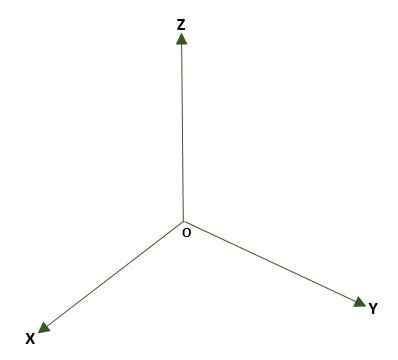
- Rechteckiges dreidimensionales System, gebildet durch drei senkrechte Linien (x, y, z), die als Punkt oder im Raum haben. Es werden drei Koordinatenebenen gebildet: XY, XZ und YZ; Der Raum wird in acht Regionen unterteilt, die als Oktanten bezeichnet werden. Die Referenz eines Punktes P des Raums wird durch die Abstände gegeben, die zwischen den Ebenen und p bestehen.
Größen
Eine Größe ist eine physische Menge, die wie bei einigen physikalischen Phänomenen durch einen numerischen Wert gezählt oder gemessen werden kann. Es ist jedoch oft notwendig, diese Phänomene mit anderen Faktoren zu beschreiben, die nicht numerisch sind. Deshalb werden die Größen in zwei Typen eingeteilt:
Skalargröße
Es sind die Beträge, die definiert und auf numerische Weise darstellen; das heißt durch ein Modul zusammen mit einer Maßeinheit. Zum Beispiel:
a) Zeit: 5 Sekunden.
b) Masse: 10 kg.
c) Volumen: 40 ml.
d) Temperatur: 40 ºC.
Vektorgröße
Es sind die Beträge, die zusammen mit einem Gerät sowie durch einen Sinn und eine Richtung durch ein Modul definiert und dargestellt werden. Zum Beispiel:
Kann Ihnen dienen: Symbolisierung von Ausdrückena) Geschwindigkeit: (5ȋ - 3ĵ) m/s.
b) Beschleunigung: 13 m /s2; S 45º e.
c) Kraft: 280 n, 120º.
d) Gewicht: -40 ĵ kg -f.
Vektorgrößen werden grafisch durch Vektoren dargestellt.
Was sind Vektoren??
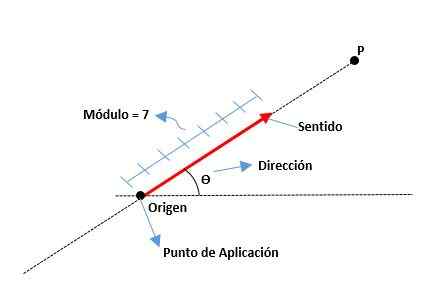
Vektoren sind grafische Darstellungen einer Vektorgröße; Das heißt, es sind Liniensegmente, in denen sein endgültiges Ende die Spitze eines Pfeils ist.
Diese werden durch sein Modul oder die Länge des Segments bestimmt, deren Sinn durch die Spitze seines Pfeils und seine Richtung gemäß der Linie, zu der es gehört, angezeigt wird. Der Ursprung eines Vektors ist auch als Anwendungspunkt bekannt.
Die Elemente eines Vektors sind die folgenden:
Modul
Es ist der Abstand vom Ursprung bis zum Ende eines Vektors, der durch eine reelle Zahl zusammen mit einer Einheit dargestellt wird. Zum Beispiel:
| Om | = | A | = A = 6 cm
Adresse
Es ist das Maß für den Winkel, der zwischen der X -Achse (aus positiv) und dem Vektor sowie den Kardinalpunkten (Nord, Süd, Ost und West) besteht.
Sinn
Es wird durch die Pfeilspitze am Ende des Vektors angegeben, um zu sehen, wohin dies gerichtet ist.
Klassifizierung von Vektoren
Im Allgemeinen werden Vektoren als:
Fester Vektor
Es ist derjenige, dessen Anwendungspunkt (Ursprung) festgelegt ist; Das heißt, es bleibt mit einem Raumraum verbunden, sodass es sich nicht in diesem bewegen kann.
Freier Vektor
Es kann sich im Raum frei bewegen, weil sich sein Ursprung zu einem beliebigen Punkt bewegt.
Siebvektor
Es ist einer, der seinen Ursprung entlang seiner Aktionslinie übertragen kann, ohne sein Modul, die Bedeutung oder die Richtung zu ändern.
Vektoreigenschaften
Zu den Haupteigenschaften der Vektoren gehören Folgendes:
Ausrüstungsvektoren
Sie sind jene freien Vektoren, die das gleiche Modul, die gleiche Richtung haben (oder diese sind parallel) und Sinn als Schieber oder ein fester Vektor.
Äquivalente Vektoren
Es tritt auf, wenn zwei Vektoren die gleiche Adresse haben (oder parallel sind), den gleichen Sinn und trotz unterschiedlicher Module und Anwendungspunkte gleiche Auswirkungen haben.
Vektorgleichheit
Diese haben das gleiche Modul, die gleiche Richtung und das gleiche Gefühl, auch wenn ihre Ausgangspunkte unterschiedlich sind, was es einem parallelen Vektor ermöglicht, sich zu sich selbst zu bewegen, ohne ihn zu beeinflussen.
Gegenüberliegende Vektoren
Sie sind diejenigen, die das gleiche Modul und die gleiche Richtung haben, aber ihre Bedeutung ist entgegengesetzt.
Einheitlicher Vektor
Es ist eines, in dem das Modul gleich der Einheit (1) ist. Dies wird erhalten, indem der Vektor durch sein Modul geteilt wird und die Richtung und Richtung eines Vektors entweder in der Ebene oder im Raum unter Verwendung der standardisierten Basis- oder Einheitsvektoren bestimmt wird, die sind:
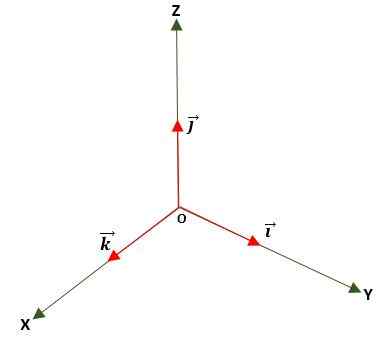
Nullvektor
Es ist derjenige, dessen Modul gleich 0 ist; Das heißt, sein Ursprungspunkt und der extreme Überblick über denselben Punkt zusammenkommen.
Vektorkomponenten
Die Komponenten eines Vektors sind diese Werte der Vektorprojektionen an den Achsen des Referenzsystems; Abhängig von der Zersetzung des Vektors, der sich in Achsen von zwei oder drei Abmessungen befinden kann, werden zwei oder drei Komponenten erhalten.
Die Komponenten eines Vektors sind reelle Zahlen, die positiv, negativ oder sogar Null sein können (0).
Auf diese Weise, wenn Sie einen ā Vektor haben, der in einem rechteckigen Koordinatensystem in der XY -Ebene (zweidimensional) stammt, ist die Projektion auf der x -Achse āx und die Projektion auf der Y -Achse und ist āy. Somit wird der Vektor als Summe seiner Komponentenvektoren ausgedrückt.
Beispiele
Erstes Beispiel
Sie haben einen ā Vektor, der vom Ursprung beginnt und Koordinaten seiner Ziele gegeben werden. Somit ist der Vektor ā = (āX; ZUUnd) = (4; 5) cm.
Kann Ihnen dienen: 120 Divisors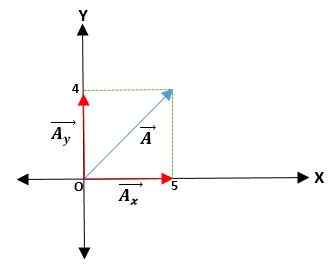
Wenn der Vektor ā auf den Ursprung eines dreidimensionalen dreieckigen Koordinatensystems (im Weltraum) x, y, z zu einem anderen Punkt (P) wirkt, werden die Projektionen auf ihren Achsen āx, āy und āz sein; Somit wird der Vektor als Summe seiner drei Komponentenvektoren ausgedrückt.
Zweites Beispiel
Sie haben einen ā Vektor, der vom Ursprung beginnt und Koordinaten seiner Ziele gegeben werden. Somit ist der Vektor ā = (aX; ZUUnd; ZUz) = (4; 6; -3) cm.
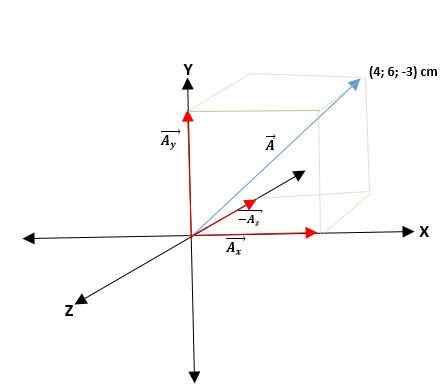
Vektoren mit ihren rechteckigen Koordinaten können nach ihren Basisvektoren ausgedrückt werden. Dafür muss nur jede Koordinate mit seinem jeweiligen Einheitsvektor multipliziert werden, sodass für die Ebene und der Raum die folgenden sind:
Für die Ebene: ā = aXi +aUndJ.
Für den Raum: ā = aXi +aUndJ+azk.
Operationen mit Vektoren
Es gibt viele Größen, die Modul, Bedeutung und Richtung haben, wie Beschleunigung, Geschwindigkeit, Verschiebung, Kraft unter anderem.
Diese werden in verschiedenen Bereichen der Wissenschaft angewendet und um sie anzuwenden, ist es in einigen Fällen erforderlich, Operationen wie Summe, Subtraktion, Multiplikation und Aufteilung von Vektoren und Skalaren durchzuführen.
Addition und Subtraktion von Vektoren
Die Summe und Subtraktion von Vektoren wird als einzelne algebraische Operation angesehen, da die Subtraktion als Summe geschrieben werden kann; Zum Beispiel kann die Subtraktion von Vektoren ā und ē ausgedrückt werden als:
Ā - ē = ā + (-ē)
Es gibt verschiedene Methoden, um die Summe und Subtraktion von Vektoren durchzuführen: Sie können Grafiken oder Analysen sein.
Grafische Methoden
Verwendet, wenn ein Vektor ein Modul, Sinn und Richtung hat. Dafür werden Linien gezeichnet, die eine Abbildung bilden, die anschließend die resultierende Bestimmung ermittelt. Zu den Bekannten gehören Folgendes:
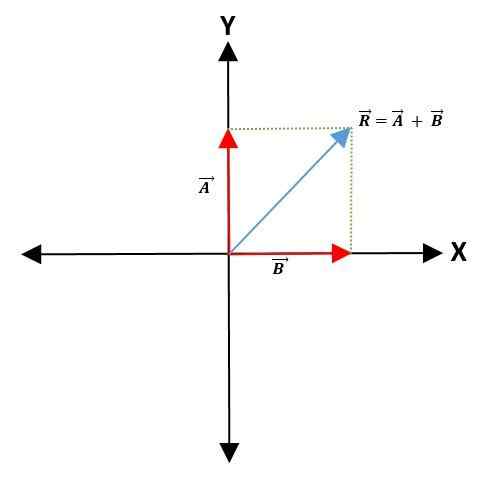
Parallelogrammmethode
Um die Summe oder Subtraktion von zwei Vektoren zu machen, wird auf der Koordinatenachse ein gemeinsamer Punkt ausgewählt, der den Ursprungspunkt der Vektoren darstellt -und ihre Modul, Richtung und Richtung beibehalten.
Dann werden parallele Linien an die Vektoren gezogen, um ein Parallelogramm zu bilden. Der resultierende Vektor ist die Diagonale, die vom Ursprungspunkt beider Vektoren bis zum Scheitelpunkt des Parallelogramms verlässt:
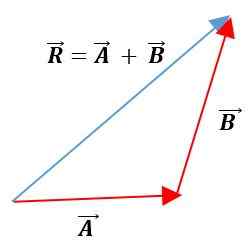
Dreiecksmethode
Bei dieser Methode werden die Vektoren untereinander platziert, wobei ihre Module, Sinne und Adressen beibehalten werden. Der resultierende Vektor wird die Vereinigung des Ursprungs des ersten Vektors mit dem Ende des zweiten Vektors sein:
analytische Methoden
Zwei oder mehr Vektoren können mit einer geometrischen oder Vektormethode hinzugefügt oder subtrahiert werden:
Geometrische Methode
Wenn zwei Vektoren ein Dreieck oder ein Parallelogramm bilden, kann das M [Odulo und die Richtung des resultierenden Vektors unter Verwendung der Gesetze der Brust und des Cosinus bestimmt werden. Somit ist das resultierende Vektormodul, das das Gesetz des Cosinus und nach der Dreiecksmethode anwendet, gegeben durch:
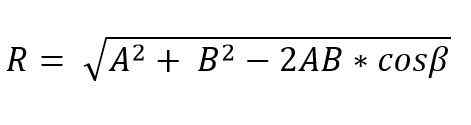
In dieser Formel ist β der entgegengesetzte Winkel zur R -Seite, und dies entspricht 180 ° - ɵ.
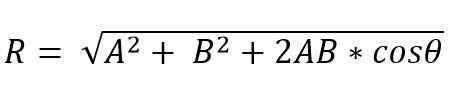
Andererseits lautet das resultierende Vektormodul nach der parallelogramm -Methode:
Die resultierende Vektoradresse wird durch Winkel (α) angegeben, der die resultierende mit einem der Vektoren bildet.
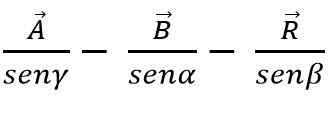
Nach dem Brustgesetz kann die Summe oder Subtraktion von Vektoren auch durch die Dreieck- oder Parallelogrammmethode erfolgen, wobei der Wissen, dass die Seiten in jedem Dreieck proportional zu den Brüsten der hübschen Winkel sind:
Vektormethode
Dies kann auf zwei Arten erfolgen: abhängig von seinen rechteckigen Koordinaten oder Basisvektoren.
Die Vektoren, die zum Ursprung von Koordinaten hinzugefügt oder subtrahiert werden, können erfolgen, und dann werden alle Projektionen in ihren rechteckigen Komponenten in jeder der Achsen für die Ebene (x, y) oder Raum (x, x, und z); Schließlich werden seine Komponenten algebraisch hinzugefügt. Für das Flugzeug ist es also:
Kann Ihnen dienen: Primo -Zahlen: Eigenschaften, Beispiele, Übungen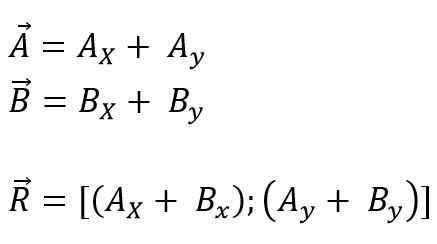
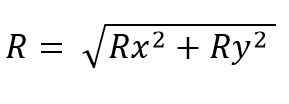
Das resultierende Vektormodul lautet:
Während für den Raum ist es:
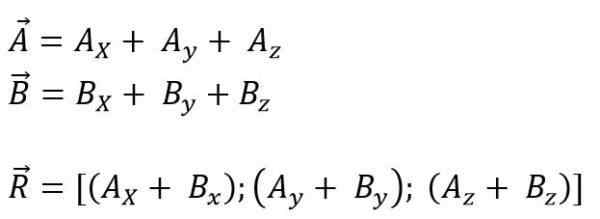
Das resultierende Vektormodul lautet:

Wenn Vektorsummen durchgeführt werden, werden mehrere Eigenschaften angewendet, dh:
- Assoziatives Eigentum: Das Ergebnis ändert sich nicht, indem zuerst zwei Vektoren hinzugefügt und dann einen dritten Vektor hinzugefügt wird.
- Kommutativgesetz: Die Reihenfolge der Vektoren verändert die resultierende nicht.
- Vektorverteilungseigenschaft: Wenn ein Skalar mit der Summe von zwei Vektoren multipliziert wird, entspricht er der Multiplikation des Skalars für jeden Vektor.
- Verteilungseigenschaftskalar: Wenn ein Vektor mit der Summe von zwei Skalaren multipliziert wird, entspricht er der Multiplikation des Vektors für jeden Skalar.
Vektor -Multiplikation
Die Multiplikation oder das Produkt von Vektoren kann als Summe oder Subtraktion durchgeführt werden, die jedoch die physische Bedeutung verliert und fast nie innerhalb der Anwendungen liegt. Im Allgemeinen sind die am häufigsten verwendeten Produkttypen das Skalar- und Vektorprodukt.
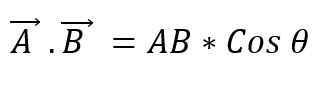
Skalarprodukt
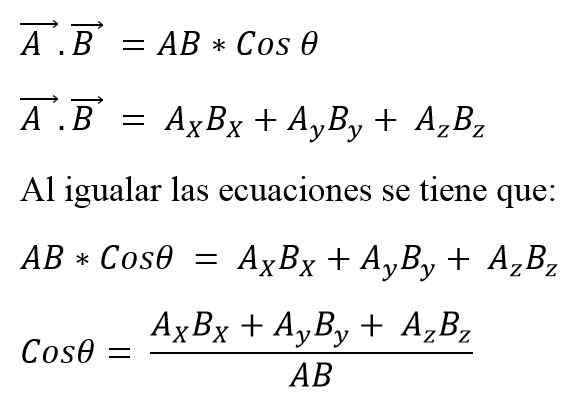
Es ist auch als Punkt von zwei Vektoren bekannt. Wenn die beiden Vektormodule mit dem zwischen ihnen gebildeten kleinen Winkel Cosinus multipliziert werden, wird ein Skalar erhalten. Um ein Skalarprodukt zwischen zwei Vektoren auszudrücken, wird ein Punkt zwischen ihnen platziert, und dies kann definiert werden als:
Der Wert des zwischen den beiden Vektoren existierenden Winkels hängt davon ab, ob diese parallel oder senkrecht sind. So müssen Sie:
- Wenn die Vektoren parallel sind und den gleichen Sinn haben, coseno 0º = 1.
- Wenn die Vektoren parallel sind und entgegengesetzte Sinne haben, coseno 180º = -1.
- Wenn die Vektoren senkrecht sind, coseno 90º = 0.
Dieser Winkel kann auch berechnet werden, wenn man weiß:
Das skalare Produkt hat die folgenden Eigenschaften:
- Gemeinsame Eigenschaft: Die Reihenfolge der Vektoren verändert den Skalar nicht.
- Verteilungseigenschaft: Wenn ein Skalar mit der Summe von zwei Vektoren multipliziert wird, entspricht er der Multiplikation des Skalars für jeden Vektor.
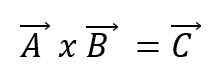
Vektorprodukt
Die Vektor -Multiplikation oder das Kreuzprodukt von zwei Vektoren A und B führt zu einem neuen Vektor C und drückt die Verwendung eines Kreuzes zwischen den Vektoren aus:
Der neue Vektor wird seine eigenen Eigenschaften haben. Dieser Weg:
- Der Adresse: Dieser neue Vektor wird senkrecht zur Ebene sein, die von den ursprünglichen Vektoren bestimmt wird.
- Er Sinn: Dies wird mit der rechten Regel bestimmt, wobei der Vektor A in die B verwandelt ist und die Richtung der Rotation mit den Fingern zeigt, und mit dem Daumen die Richtung des Vektors markiert ist.
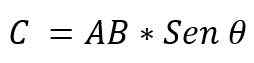
- Er Modul: Es wird durch die Multiplikation der Module der AXB -Vektoren durch den Busen des kleinen Winkels zwischen diesen Vektoren bestimmt. Es wird ausgedrückt:
Der Wert des zwischen den beiden Vektoren existierenden Winkels hängt davon ab, ob diese parallel oder senkrecht sind. Es ist also möglich, Folgendes zu bestätigen:
- Wenn die Vektoren parallel sind und die gleiche Bedeutung haben, Sinus 0º = 0.
- Wenn die Vektoren parallel sind und entgegengesetzte Sinne haben, Sinus 180º = 0.
- Wenn die Vektoren senkrecht sind, Sinus 90º = 1.
Wenn ein Vektorprodukt nach seinen Basisvektoren ausgedrückt wird, muss es:

Das skalare Produkt hat die folgenden Eigenschaften:
- Es ist nicht kommutativ: Die Reihenfolge der Vektoren verändert den Skalar.
- Verteilungseigenschaft: Wenn ein Skalar mit der Summe von zwei Vektoren multipliziert wird, entspricht er der Multiplikation des Skalars für jeden Vektor.