

Orthogonale Matrixeigenschaften, Demonstration, Beispiele
- 1540
- 189
- Jasmine Kupprion
Du hast ein Orthogonale Matrix Wenn die Matrix multipliziert mit seiner Transponierung in der Identitätsmatrix führt. Wenn die Umkehrung einer Matrix gleich dem transponierten ist, ist die ursprüngliche Matrix orthogonal.
Orthogonale Matrizen sind charakteristisch, dass die Anzahl der Zeilen der Anzahl der Spalten entspricht. Darüber hinaus sind Reihenvektoren orthogonale Einheitsvektoren und der Ausschlag von transponierten Vektoren auch.
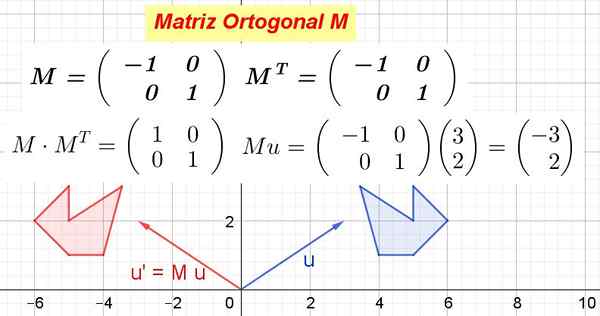 Abbildung 1. Beispiel für orthogonale Matrix und wie geometrische Objekte transformiert. (Vorbereitet von Ricardo Pérez)
Abbildung 1. Beispiel für orthogonale Matrix und wie geometrische Objekte transformiert. (Vorbereitet von Ricardo Pérez) Wenn eine orthogonale Matrix mit den Vektoren eines Vektorraums multipliziert wird, erzeugt a isometrische Transformation, das heißt eine Transformation, die die Entfernungen nicht verändert und die Winkel bewahrt.
Ein typischer Vertreter orthogonaler Matrizen sind die Rotationsmatrizen. Die Transformationen orthogonaler Matrizen auf einem Vektorraum werden genannt Orthogonale Transformationen.
Die geometrischen Transformationen von Rotation und Reflexion von Punkten, die durch ihre kartesischen Vektoren dargestellt werden. Aus diesem Grund werden orthogonale Matrizen in der rechnerischen grafischen Verarbeitung häufig verwendet.
[TOC]
Eigenschaften
Eine Anordnung M Es ist orthogonal, wenn es mit seiner Transponierung multipliziert wird MT Die Identitätsmatrix führt dazu Yo. In ähnlicher Weise das Produkt der Transponierung einer orthogonalen Matrix durch die ursprüngliche Matrix der Identitätsmatrix:
M mT = MT M = i
Als Folge der vorherigen Aussage ist die Transport einer orthogonalen Matrix gleich ihrer inversen Matrix:
MT = M-1.
Die Menge der orthogonalen Dimensionsmatrizen n x n Sie bilden die orthogonale Gruppe Oder (n). Und die Untergruppe von Oder (n) von orthogonalen Matrizen mit Bestimmung +1 Form der Special Matrices gruppieren seine (n). Gruppenmatrizen Dein (n) Es handelt sich um Matrizen, die lineare Rotationstransformationen erzeugen, auch bekannt als die Rotationsgruppe.
Demonstration
Wir werden zeigen, dass eine Matrix orthogonal ist, wenn und nur wenn die Zeilenvektoren (oder Säulenvektoren) orthogonal zueinander und von Norm 1 sind.
Kann Ihnen dienen: Bayes TheoremAngenommen, die Reihen einer orthogonalen Matrix n x n sind n n n n ortonormale Vektoren der Dimension n. Wenn es mit bezeichnet wird durch v1, v2,.. ., vN Die N -Vektoren sind erfüllt:

Wo es offensichtlich ist, dass der Satz von Zeilenvektoren eine Reihe orthogonaler Vektoren mit norm ist.
Beispiele
Beispiel 1
Zeigen Sie, dass die 2 x 2 -Matrix, die der Vektor in seiner ersten Reihe hat V1= (-1 0) und in seiner zweiten Reihe der Vektor V2= (0 1) ist eine orthogonale Matrix.
Lösung: Die Matrix ist gebaut M und seine Transponierung wird berechnet MT:
In diesem Beispiel die Matrix M Es ist ein transponiertes Auto, das heißt, dass die Matrix und ihre Transponierung identisch sind. Es multipliziert M für seine Transponierung MT:

Es wird überprüft, dass M MT Es ist gleich der Identitätsmatrix:
Wenn die Matrix M Es wird durch die Koordinaten eines Vektors oder eines Punktes multipliziert. Es werden neue Koordinaten erhalten, die der Transformation entsprechen, die die Matrix am Vektor oder den Punkt herstellt.
Abbildung 1 zeigt, wie M Verwandelt den Vektor oder In oder' Und auch mögen M Verwandeln Sie das blaue Polygon in das rote Polygon. Als M Es ist orthogonal, es ist dann eine orthogonale Transformation, die Entfernungen und Winkel bewahrt.
Beispiel 2
Angenommen, Sie haben eine 2 x 2 -Matrix, die in den Reais definiert wird, die durch den folgenden Ausdruck gegeben sind:
Finden Sie die wirklichen Werte von Zu, B, C Und D so dass die Matrix M Eine orthogonale Matrix sein.
Lösung: Per Definition ist eine Matrix orthogonal, wenn sie durch ihre Transponierung multipliziert wird. Wenn Sie daran denken, dass die transponierte Matrix aus dem Original erhalten wird, ist der Austausch von Zeilen durch Spalten die folgende Gleichheit:
Es kann Ihnen dienen: Domäne und Widerspruch einer Funktion (mit Beispielen)
Die Matrixmultiplikation durchzuführen ist:

Ausgleich der Elemente der linken Matrix mit den Elementen der Identitätsmatrix rechts erhalten wir ein System mit vier Gleichungen mit vier Unbekannten A, B, C und D.
Wir schlagen für A, B, C und D die folgenden Ausdrücke vor, die auf trigonometrischen Gründen basieren: Sinus und Cosinus:

Mit diesem Vorschlag und aufgrund der grundlegenden trigonometrischen Identität ist die erste und dritte Gleichung in der Gleichheit der Matrixelemente automatisch erfüllt. Die dritte und vierte Gleichung ist gleich und in der Matrixgleichheit nach dem Ersetzen der vorgeschlagenen Werte ist wie folgt:

Was zu der folgenden Lösung führt:

Schließlich werden die folgenden Lösungen für die orthogonale Matrix m erhalten:
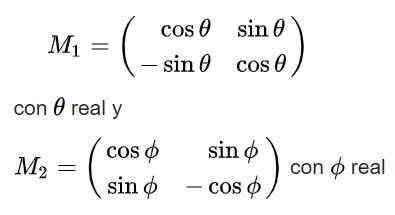
Beachten Sie, dass die erste der Lösungen eine Determinante +1 hat, daher gehört sie zu ihrer Gruppe (2), während die zweite Lösung eine Determinante -1 hat und daher nicht zu dieser Gruppe gehört.
Beispiel 3
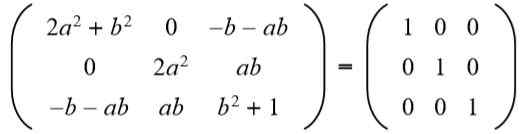
Finden Sie bei der folgenden Matrix die Werte von A und B, um eine orthogonale Matrix zu haben.
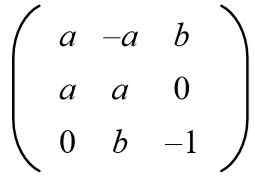
Lösung: Damit eine bestimmte Matrix orthogonal ist, muss das Produkt mit seiner Transponierung die Identitätsmatrix sein. Anschließend wird das Matrixprodukt der mit seiner transponierten Matrix angegebenen Matrix das folgende Ergebnis angegeben:

Als nächstes wird das Ergebnis mit der Identitätsmatrix 3 x 3 übereinstimmt:
In der zweiten Zeile dritte Spalte haben Sie (A b = 0), Aber Zu Es kann nicht Null sein, denn wenn ja, würde die Gleichheit der Elemente der zweiten Zeile und der zweiten Spalte nicht erfüllt werden. Dann notwendigerweise B = 0. Ersetzen B Für den Wert 0 haben wir:
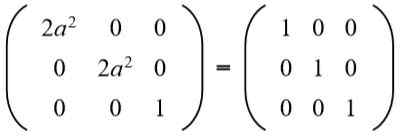
Dann wird die Gleichung gelöst: 2a^2 = 1, deren Lösungen sind: +½net2 und -½√2.
Kann Ihnen dienen: Arten von Winkeln, Eigenschaften und BeispielenDie positive Lösung aufnehmen Zu Es entsteht die folgende orthogonale Matrix:
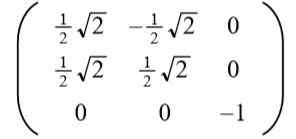
Der Leser kann leicht überprüfen.
Beispiel 4
Zeigen, dass die Matrix ZU deren Reihen sind V1 = (0, -1 0), V2 = (1, 0, 0) Und V3 = (0 0 -1) Es ist eine orthogonale Matrix. Ermitteln Sie außerdem, wie sich die Vektoren der kanonischen Basis transformieren Ich J k Zu den Vektoren U1, U2 Und U3.
Lösung: Es sollte daran erinnert werden, dass das Element (i, j) einer Matrix, multipliziert mit seiner Transponierung. Darüber hinaus entspricht dieses Produkt dem Delta von Kronecker, falls die Matrix orthogonal ist:
In unserem Fall ist es so:
V1 • v1 = 0x0 + (-1) x (-1) + 0x0 = 1
V2 • v2 = 1 × 1 + 0x0 + 0x0 = 1
V3 • v3 = 0x0 + 0x0 + (-1) x (-1) = 1
V1 • v2 = 0x1 + (-1) x0 + 0x0 = 0
V2 • v1 = 1 × 0 + 0x (-1) + 0x0 = 0
V2 • v3 = 1 × 0 + 0x (0) + 0x (-1) = 0
V3 • v2 = 0x1 + 0x (0) + (-1) x0 = 0
V1 • v3 = 0x0 + (-1) x (0) + 0x (-1) = 0
V3 • v1 = 0x0 + 0x (-1) + (-1) x0 = 0
Mit dem, was gezeigt wird, dass es sich um eine orthogonale Matrix handelt.
Neben u1 = a i = (0, 1, 0); U2 = a j = (-1, 0, 0) und schließlich U3 = a k = (0, 0, -1)
Verweise
- Anthony Nicolaides (1994) Determinanten & Matrizen. Veröffentlichung passieren.
- Birkhoff und Maclane. (1980). Moderne Algebra, ed. Vicens-Vives, Madrid.
- Casteleiro Villalba m. (2004) Einführung in die lineare Algebra. ESIC Editorial.
- Dave Kirkby (2004) Mathematik Connect. Heinemann.
- Jenny Olive (1998) Mathematik: Der Überlebensführer eines Schülers. Cambridge University Press.
- Richard J. Brown (2012) 30-Sekunden-Mathematik: Die 50 am meisten umwerfenden Theorien in Mathematik. Ivy Press Limited.
- Wikipedia. Orthogonale Matrix. Geborgen von: ist.Wikipedia.com
- Wikipedia. Orthogonale Matrix. Abgerufen von: in.Wikipedia.com
- « Erklärung des Overlay -Theorems, Anwendungen, Übungen behoben
- Was ist die Ermächtigung von Frauen und wie es erzeugt wird?? »