

Drehimpulsmenge, Erhaltung, Beispiele, Übungen
- 4280
- 92
- Timo Rabenstein
Er Winkelimpuls o Die Menge der Winkelbewegung ist für die Rotationsbewegung das lineare Moment für die Übersetzungsbewegung. Es ist eine Vektorgröße, die die Drehung eines pünktlichen Teilchens oder eines ausgedehnten Objekts um eine Achse, die durch einen Punkt verläuft.
Dies bedeutet, dass die Drehachse, wenn der Winkelimpuls berechnet wird, bequem angegeben werden muss.
Beginnend mit einem materiellen Massenpunkt m wird der Winkelimpuls durch gekennzeichnet durch L, der lineare Moment als P und die Position des Partikels in Bezug auf eine Achse, die durch einen bestimmten Punkt fließt oder ist R, So:
L = R X P
Fettköpfige Buchstaben sind für Vektorgrößen reserviert, und das Kreuz bedeutet, dass der Winkelimpuls das Vektorprodukt zwischen dem Positionsvektor ist R und der lineare Moment P des Teilchens. Der Vektor, der aus einem Vektorprodukt resultiert, ist senkrecht zur Ebene der teilnehmenden Vektoren.
Dies bedeutet, dass die Richtung und das Gefühl von L Sie können durch die rechte Hand für das Kreuzprodukt gefunden werden.
Im internationalen Einheitensystem sind die Einheiten des Winkelimpulses kgoge2/s, die keinen besonderen Namen haben. Und für einen erweiterten Körper, der aus vielen Partikeln besteht, erstreckt sich die vorherige Definition bequem.
[TOC]
Menge der Winkelbewegung
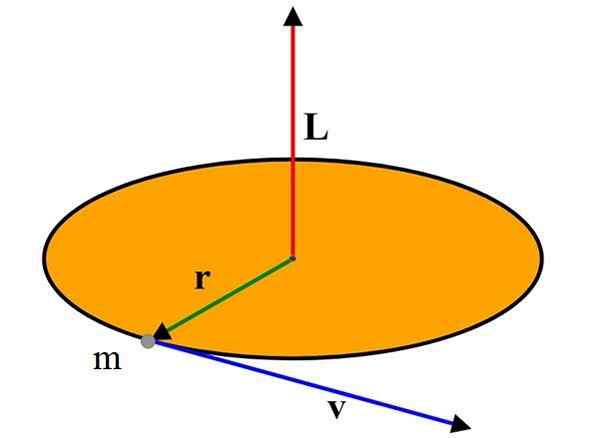
Beziehung zwischen den Drehimpulsvektoren in Bezug auf einen bestimmten Punkt oder eine lineare Zeit für ein pünktliches Teilchen, das sich in einem Kreis bewegt. Quelle: Modifiziert durch f. Zapata von Wikimedia Commons. Die Größe des Winkelimpulsvektors entspricht der Definition des Vektorprodukts:
L = rúm · Vësen ϕ = mv (rúsen ϕ) = mvℓ
Wobei ϕ der Winkel zwischen den Vektoren ist R Und v. Dann ist ℓ = r sen ϕ der senkrechte Abstand zwischen der Linie von v Und der Punkt oder.
Im Fall des Teilchens, das sich bewegt und den im oberen Bild gezeigten Umfang beschreibt, beträgt dieser Winkel 90º.
Daher sen 90º = 1 und die Größe von L Ist:
L = m · Rash
Der Moment der Trägheit
Das Trägheitsmoment eines starren Körpers beschreibt die Trägheit des Körpers gegen Rotation um eine bestimmte Achse.
Es hängt nicht nur vom Körperkörper ab, sondern auch vom Abstand zur Rotationsachse. Dies ist leicht verständlich, wenn der Meinung ist, dass es für einige Objekte in Bezug auf einige Achsen leichter zu drehen ist als für andere.
Für ein Partikelsystem wird der durch Buchstaben I gekennzeichnete Moment der Trägheit angegeben:
Kann Ihnen dienen: WinkelbeschleunigungI = ∑ rYo2 ΔMYo
Wo ΔMYo Es ist ein kleiner Teil des Teigs und rYo Es ist sein Abstand von der Rotationsachse. Ein ausgedehnter Körper besteht aus zahlreichen Partikeln, daher ist sein Moment der Gesamtträte die Summe aller Produkte zwischen Masse und Entfernung, der Partikel, aus denen es zusammenbringt, ist.
Wenn es sich um einen erweiterten Körper handelt, ändert sich der Sommer zu einem Integral und ΔM Es wird ein Massenunterschied DM. Integrationsgrenzen hängen von der Objektgeometrie ab:
I = ∫M (R2) Dm
Das Konzept des Trägheitsmoments hängt eng mit dem Winkelimpuls eines erweiterten Objekts zusammen, wie wir dann sehen werden.
Winkelimpuls eines Partikelsystems
Betrachten Sie ein Partikelsystem, das aus Masse besteht ΔMYo das dreht sich nach einem Kreis in der Ebene Xy, Jeder hat eine lineare Geschwindigkeit, die mit seiner Winkelgeschwindigkeit zusammenhängt, letztere für alle Partikel:
vYo = ΩrYo
Wo rYo Es ist der Abstand zur Rotationsachse oder. Die Größe des Winkelimpulses beträgt also:
LYo = ΔMYo. RYo. (ΩrYo) = RYo2Ω δmYo
Der Winkelimpuls des Systems wird durch die Summe gegeben:
L = Ω ∑ rYo2 ΔMYo
Wir identifizieren schnell den im vorherigen Abschnitt definierten Trägheitsmoment, und daher bleibt die Größe seines Winkelimpulses wie folgt:
L = iω
Wie wir bereits gesagt haben, dass sich das Partikelsystem in der XY -Ebene befand, stellt sich heraus. Die Bedeutung wird durch die Rotation gegeben: das Winkelmoment.
Ein ausgedehnter Körper kann in Scheiben unterteilt werden, die jeweils mit einem eckigen Impuls gegeben werden durch L = iω entlang der Z -Achse gerichtet. Wenn die Objektsymmetrieachse mit der Z -Achse zusammenfällt, gibt es kein Problem, da selbst bei Punkten, die sich nicht in der XY -Ebene befinden.
Vektorial:
L = IΩ
Diese Gleichung gilt für drei dimensionale Objekte, die sich um eine Symmetrieachse drehen.
Wenn der Winkelimpuls variiert?
Wenn eine Nettokraft auf ein Teilchen oder einen Körper wirkt. Um zu wissen, wenn wir variieren, verwenden wir das Derivat, was uns die Änderungsrate im Laufe der Zeit gibt, wenn es gibt:
Kann Ihnen dienen: Siliziumoxid (SiO2): Struktur, Eigenschaften, Verwendungen, erhalten)
Anwendung der Produktregel für das Derivat:
+\left&space;(\mathbfr\times&space;\fracd\mathbfpdt&space;\right&space;))
Der Begriff v x mv Es ist ungültig, da es das Produkt eines Vektors mit sich selbst ist und im zweiten Term die Nettokraft finden F = mZu, Deshalb:

Das Vektorprodukt R X F Es ist nichts anderes als das Drehmoment oder das Moment der Netto -Torsion, manchmal mit den griechischen Texten bezeichnet τ oder wie M, Immer mutig, da es sich um eine Vektormenge handelt. In Analogie mit dem linearen Moment variiert der Winkelimpuls, solange ein Drehmoment oder ein Moment der Netto -Torsion vorhanden ist:
DL/dt = M
Winkelimpulserhaltung
Aus den vorhergehenden Abschnitten haben wir das gesehen:
DL/dt = M
Das heißt, der Winkelimpuls variiert, wenn es ein Moment der Netto -Torsion gibt. Wenn es keinen Moment der Netto -Torsion gibt, dann:
DL/dt = 0 → l Es ist konstant
Mit anderen Worten:
Anfangswinkelimpuls = endgültiger Winkelimpuls
Dieses Ergebnis ist immer noch gültig, wenn ein Körper nicht starr ist, wie wir in den folgenden Beispielen sehen werden.
Beispiele
Der Winkelimpuls ist eine wichtige Größe, die in zahlreichen Situationen zeigt, was zeigt, wie universell es ist:
Künstlerisches Skaten und andere Sportarten
 Links beginnt sich der Skater mit ausgedehnten Armen nach rechts zu drehen, schrumpft die Arme gegen den Körper und überschreitet die Beine, um die Drehzahl zu erhöhen. Quelle: Wikimedia Commons.
Links beginnt sich der Skater mit ausgedehnten Armen nach rechts zu drehen, schrumpft die Arme gegen den Körper und überschreitet die Beine, um die Drehzahl zu erhöhen. Quelle: Wikimedia Commons. Wenn sich ein Körper, der sich zusammenzieht, seine Drehzahl zunimmt, kennt dies die Eisskater gut.
Dies liegt daran, dass wenn wir Arme und Beine zusammenziehen.
Dies gilt nicht nur für das Skaten, sondern auch für Sport und Aktivitäten, in denen Kurven müssen.
Katzen stehen stehen

Katzen reparieren sie immer, um auf allen vieren zu landen, wenn sie fallen. Auch wenn sie nicht über eine anfängliche Bewegung verfügen, stellen sie sicher, dass sie schnell die Beine und den Schwanz drehen, um ihre Rotationsträges zu ändern und sie zu reparieren, um aufzustehen.
Ebenso ist ihre Winkelimpuls im Manövrieren ungültig, da ihre Rotation nicht kontinuierlich ist.
Die Bewegung eines Frisbee

Ein Frisbee muss gestartet werden, indem er zum Fliegen gedruckt wird, da es sonst fällt. In der Tat der Winkelmoment.
Es kann Ihnen dienen: Stationäre Wellen: Formeln, Eigenschaften, Typen, BeispieleDie Bälle im Sport

Baseball, Fußball, Basketball und andere Sportbälle haben einen eckigen Dynamik. Da sie sphärisch sind, haben sie einen Moment der Trägheit und während des Spiels werden sie gedreht. Wie der Moment der Trägheit einer Kugel ist:
I = (2/5) MR2
Wobei m die Masse des Balls und R sein Radius ist, ist der Trägheitsmoment in Bezug auf eine bestimmte Achse (fest):
L = (2/5) MR2Ω
Der Mondhalter
Der Mond bewegt sich von der Erde weg, da die Drehzahl der Erde aufgrund der Reibung zwischen den großen Wassermassen und dem Hintergrund des Meeres abnimmt.
Das Erd-Luna-System behält sein Winkelmoment bei.
Das Atom
Das erste Postulat des Atommodells von Bohr besagt, dass ein Elektron nur Umlaufbahnen besetzt H/2π, Wo H Plancks Konstante ist.
Übung gelöst
Eine dünne Stahlstange hat eine Masse von 500 g und eine Länge von 30 cm. Dreht sich um eine Achse, die mit einer Rate von 300 Umdrehungen pro Minute durch ihr Zentrum führt. Bestimmen Sie das Modul seiner Winkelbewegung.
Lösung
Wir werden den Trägheitsmoment der Stange brauchen, der sich auf eine Achse bezieht, die durch ihre Mitte fließt. Die Beratung des Trägheitsimpulses wird festgestellt, dass:
I = (1/12) ml2 = (1/12) × 0.5 kg x (30 × 10)-2 M)2 = 3.75 × 10-3 kg.M2
Da es sich um einen erweiterten Körper handelt, den wir die Winkelgeschwindigkeit kennen, verwenden wir:
L = iω
Bevor wir Winkelgeschwindigkeit oder Winkelfrequenz verwandeln Ω zu radianes/s:
Ω = (300 Revolutionen/Minute) × (1 Minute/60 Sekunden) x (2π Radians/Revolution) = 10 π rad/s
Austausch:
L = 3.75 x 10-3 kgoge2 × 10 π rad/s = 0.118 kgm2 / S
Verweise
- Bauer, w. 2011. Physik für Ingenieurwesen und Wissenschaften. Band 1. Mc Graw Hill.
- Giambattista, a. 2010. Physik. 2. Ed. McGraw Hill.
- Giancoli, d. 2006. Physik: Prinzipien mit Anwendungen. 6. Ed Prentice Hall.
- Ritter, r. 2017. Physik für Wissenschaftler und Ingenieurwesen: Ein Strategieansatz. Pearson.
- Serway, r., Jewett, J. (2008). Physik für Wissenschaft und Ingenieurwesen. Band 1. 7. Ed. Cengage Lernen.
- Tippens, p. 2011. Physik: Konzepte und Anwendungen. 7. Ausgabe. McGraw Hill.
- « Boden und Fauna der repräsentativen Arten von Afrika
- Raault -Prinzip und Formelgesetz, Beispiele, Übungen »