

Rechte Regel
- 3921
- 942
- René Riediger
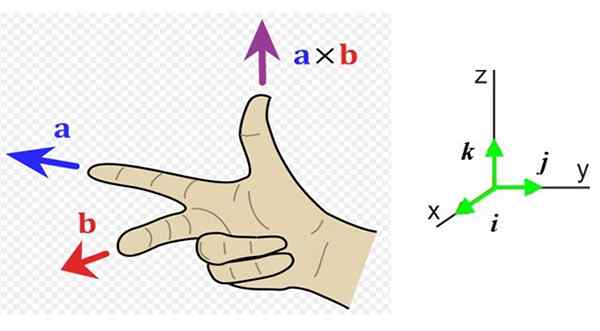 Abbildung 1. Rechte Regel. Quelle: Wikimedia Commons. ACDX [CC BY-S (http: // CreePecommons.Org/lizenzen/by-sa/3.0/]].
Abbildung 1. Rechte Regel. Quelle: Wikimedia Commons. ACDX [CC BY-S (http: // CreePecommons.Org/lizenzen/by-sa/3.0/]]. Was ist die rechte Handregel??
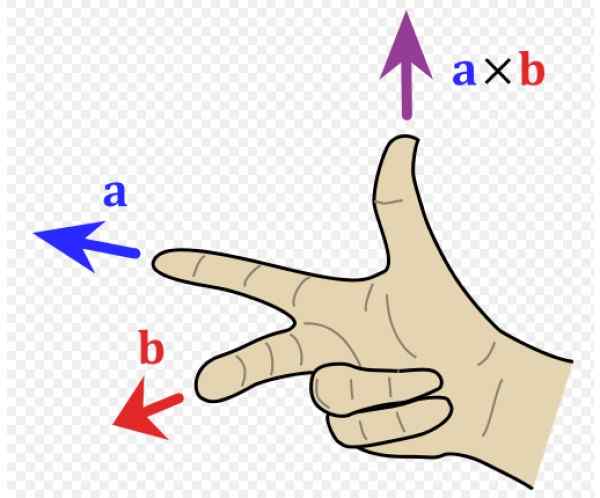
Der Rechte Regel Es ist eine mnemonische Ressource, um die Richtung und Richtung des Vektors zu etablieren, die sich aus einem Vektorprodukt oder einem Kreuzprodukt ergeben. Es wird in der Physik häufig verwendet, da es wichtige Vektorgrößen gibt, die das Ergebnis eines Vektorprodukts sind. Dies ist der Fall von Drehmoment, Magnetkraft, Winkelimpuls und magnetischem Moment zum Beispiel.
Zwei generische Vektoren sein Zu Und B dessen Kreuzprodukt ist Zu X B. Das Modul eines solchen Vektors lautet:
Zu X B = Zu.B.Sünde α
Wobei α der minimale Winkel zwischen ist Zu Und B, Während A und B ihre Module darstellen. Um Vektoren von ihren Modulen zu unterscheiden, werden kräftige Buchstaben verwendet.
Jetzt müssen wir die Richtung und Bedeutung dieses Vektors kennen. Daher ist es bequem, ein Referenzsystem mit den drei Richtungen des Raums zu haben (Abbildung 1 rechts). Die Einheitenvektoren Yo, J Und k Sie zeigen jeweils auf den Leser (außerhalb der Seite), rechts und nach oben und nach oben.
Im Beispiel von Abbildung 1 links der Vektor Zu geht nach links (Adresse Und negativer und Indexfinger der rechten Hand) und der Vektor B Geht zum Leser (Adresse X positiver, mittlerer Finger der rechten Hand).
Der resultierende Vektor Zu X B hat die Daumenrichtung, in Richtung in Richtung z positiv.
Zweite Regel der rechten Hand
Diese Regel wird häufig verwendet, wenn Größen vorhanden sind, deren Richtung und Bedeutung sich drehen, wie z. B. das Magnetfeld B erzeugt durch einen dünnen und geradlinigen Draht, der einen Strom transportiert.
In diesem Fall sind die Magnetfeldleitungen konzentrische Umgehungen mit dem Draht, und die Richtung der Drehung wird mit dieser Regel wie folgt erhalten: Der rechte Daumen zeigt die Richtung des Stroms an und die verbleibenden vier Finger sind in Richtung der Richtung gekrümmt Richtungsrichtung. Wir veranschaulichen das Konzept in Abbildung 2.
Kann Ihnen dienen: Elastische Schocks: In einer Dimension, besonderen Fällen, Übungen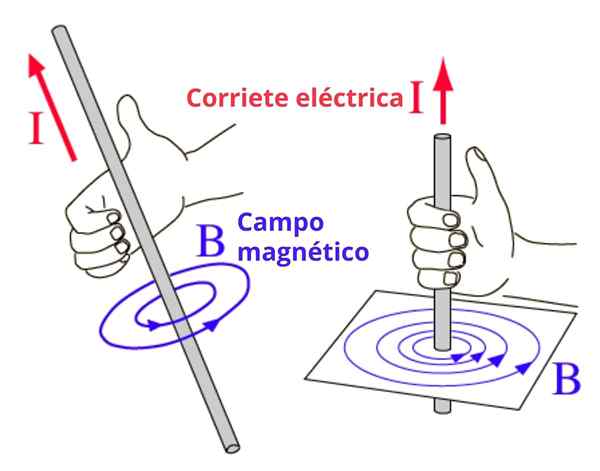 Figur 2. Rechte Handregel, um die Bedeutung des Magnetfeldzirkulation zu bestimmen
Figur 2. Rechte Handregel, um die Bedeutung des Magnetfeldzirkulation zu bestimmen Alternative Regel der rechten Hand
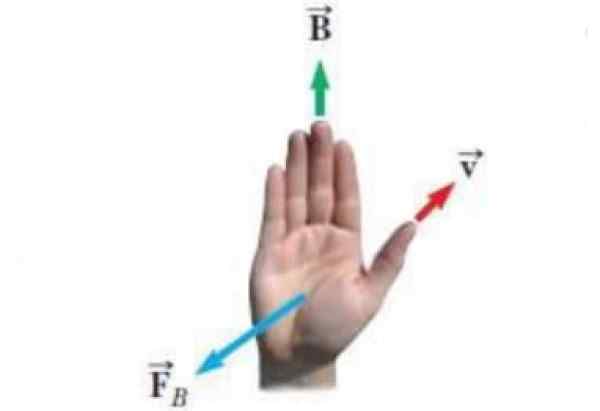
Die folgende Abbildung zeigt eine alternative Form der rechten Regel. Die Vektoren, die in der Aufklärung erscheinen, sind:
- Geschwindigkeit v einer pünktlichen Belastung, die.
- Das Magnetfeld B innerhalb dessen sich die Last bewegt.
- FB Die Kraft, die das Magnetfeld auf die Last ausübt.
 Figur 3. Alternative Regel der rechten Hand. Quelle: Wikimedia Commons. Experticuis [CC BY-SA (https: // CreateRecommons.Org/lizenzen/by-sa/4.0)]]
Figur 3. Alternative Regel der rechten Hand. Quelle: Wikimedia Commons. Experticuis [CC BY-SA (https: // CreateRecommons.Org/lizenzen/by-sa/4.0)]] Die Gleichung für Magnetkraft ist FB = qv X B und die Regel der rechten Hand, um die Richtung und den Sinn von zu kennen FB Es gilt wie folgt: Die Daumenpunkte nach v, die verbleibenden vier Finger werden nach Feld B platziert. So FB Es ist ein Vektor, der aus der Handfläche kommt, senkrecht dazu, als würde es die Last drücken.
Beachten Sie, dass FB würde in die entgegengesetzte Richtung zeigen, wenn die Last negativ war, da das Vektorprodukt nicht kommutativ ist. In der Tat:
Zu X B = - B X Zu
Anwendungen
Die rechte Handregel kann auf verschiedene physikalische Größen angewendet werden. Lassen Sie uns einige von ihnen kennen:
Winkelgeschwindigkeit und Beschleunigung
Beide Winkelgeschwindigkeit Ω Wie eckige Beschleunigung α Sie sind Vektoren. Wenn sich ein Objekt um eine feste Achse dreht, ist es eine mögliche Winkelgeschwindigkeit Ω.
Für seinen Teil die Winkelbeschleunigung α wird die gleiche Adresse haben wie Ω, Aber seine Bedeutung hängt davon ab, ob Ω Erhöht oder verringert die Größe im Laufe der Zeit. Im ersten Fall haben beide die gleiche Richtung und Bedeutung, aber im zweiten haben sie entgegengesetzte Sinne.
Kann Ihnen dienen: Watt Law: Was ist, Beispiele, Anwendungen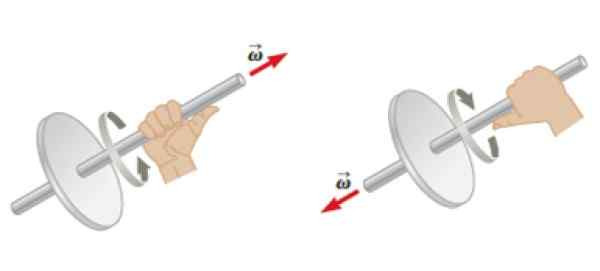 Figur 4. Die auf ein Objekt in der Drehung angewendete rechte Handregel, um die Richtung und Richtung der Winkelgeschwindigkeit zu bestimmen. Quelle: Serway, r. Physisch.
Figur 4. Die auf ein Objekt in der Drehung angewendete rechte Handregel, um die Richtung und Richtung der Winkelgeschwindigkeit zu bestimmen. Quelle: Serway, r. Physisch. Der Winkelimpuls
Der Winkelvektor LENTWEDER eines Teilchens, das sich um eine bestimmte Achse dreht oder als Vektorprodukt seines sofortigen Positionsvektors definiert ist R und die Menge an linearer Bewegung P:
L = R X P
Die rechte Handregel wird auf diese Weise angewendet: Der Indexfinger wird in die gleiche Richtung und Richtung von platziert R, Der Mittelfinger in der P, beide auf einer horizontalen Ebene, wie in der Figur. Automatisch erstreckt sich der Daumen vertikal nach oben und zeigt auf die Richtung und Richtung des Winkelimpulses LENTWEDER.
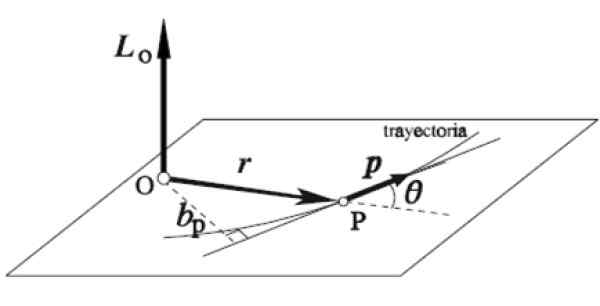 Abbildung 5. Der Winkelvektor. Quelle: Wikimedia Commons.
Abbildung 5. Der Winkelvektor. Quelle: Wikimedia Commons. Übungen
Übung 1
Der Dreh von Abbildung 6 verläuft schnell mit Winkelgeschwindigkeit Ω und seine Symmetrieachse, die langsamer um die vertikale Achse zerbrochen ist z. Diese Bewegung heißt Präzession. Beschreiben Sie die Kräfte, die auf den Spin und die Wirkung, die sie erzeugen.
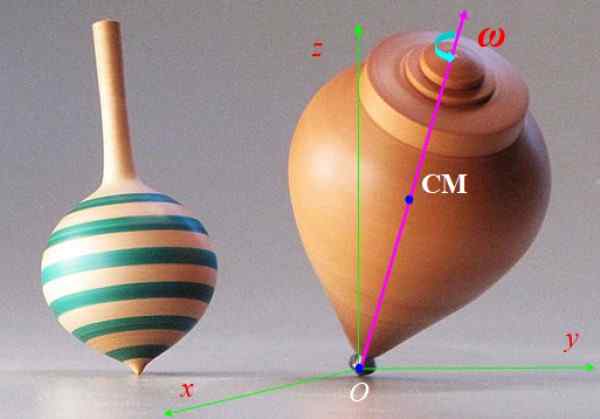 Abbildung 6. Drehspin. Quelle: Wikimedia Commons.
Abbildung 6. Drehspin. Quelle: Wikimedia Commons. Lösung
Die Kräfte, die auf den Spin wirken, sind normal N, angewendet auf den Stützpunkt mit dem Boden oder mehr das Gewicht mG, im Zentrum von Massenschwerpunkt CM angewendet, mit G Der Schweregradbeschleunigungsvektor, vertikal nach unten gerichtet (siehe Abbildung 7).
Beide Kräfte sind ausgeglichen, daher bewegt sich der Spin nicht. Das Gewicht erzeugt jedoch ein Drehmoment oder ein Drehmoment τ Netz über den Punkt oder, gegeben von:
τENTWEDER = RENTWEDER X F, mit F = MG.
Als R und MG Sie sind immer im Flugzeug, wenn sich der Spin nach der Regel der rechten Hand um den Drehmoment dreht τENTWEDER Es befindet sich immer im Flugzeug Xy, senkrecht beides a R als G.
Beachten Sie, dass N erzeugt kein Drehmoment in Bezug auf O, weil sein Vektor R Bezüglich oder null ist. Dieses Drehmoment führt zu einer Änderung des Winkelimpulses, der die Präzession des Spin um die Z -Achse verursacht.
Kann Ihnen dienen: thermodynamische Balance: Klassen und Anwendungen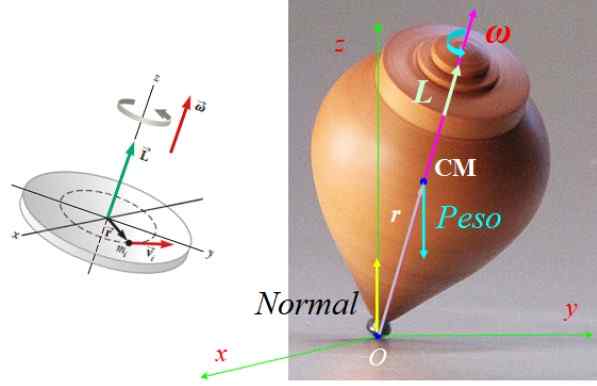 Abbildung 7. Kräfte, die auf den Spin und seinen Winkelimpektor wirken. Quelle der linken Abbildung: Serway, r. Physik für Wissenschaft und Ingenieurwesen.
Abbildung 7. Kräfte, die auf den Spin und seinen Winkelimpektor wirken. Quelle der linken Abbildung: Serway, r. Physik für Wissenschaft und Ingenieurwesen. Übung 2
Weisen Sie die Richtung und Richtung des Winkelimpulsvektors auf L der Trumpe von Abbildung 6.
Lösung
Jeder Punkt des Spins hat Masse mYo, Geschwindigkeit vYo und Position Vector RYo, Wenn es sich um die Z -Achse dreht. Der Winkelimpuls LYo des genannten Teilchens ist:
LYo = RYo X PYo = RYo x mYovYo
Angesichts der RYo Und vYo Sie sind senkrecht, die Größe von L Ist:
LYo = mYoRYovYo
Die lineare Geschwindigkeit v hängt mit der Winkelgeschwindigkeit zusammen Ω durch:
vYo = rYoΩ
Deshalb:
LYo = mYoRYo (RYoΩ) = mYoRYo2Ω
Der Gesamtwinkelimpuls des Trompos ist die Summe des Winkelimpulses jedes Partikels:
L = (∑mYoRYo2 ) Ω
∑ mYoRYo2 Es ist dann der Moment der Trägheit I des Spins: dann:
L= IΩ
Deshalb L Und Ω Sie haben die gleiche Richtung und Bedeutung, wie in Abbildung 7 gezeigt.