

Vektoreigenschaften und Eigenschaften, Elemente, Typen, Beispiele
- 4287
- 970
- René Riediger
Der Vektoren Sie sind mathematische Wesenheiten, die eine Größenordnung haben -in der Regel von einer Maßeinheit, zusätzlich zu Richtung und Bedeutung. Solche Merkmale sind sehr geeignet, um physikalische Größen wie Geschwindigkeit, Stärke, Beschleunigung und viele mehr zu beschreiben.
Bei Vektoren ist es möglich, Operationen wie Summe, Subtraktion und Produkte durchzuführen. Die Abteilung ist für Vektoren nicht definiert, und was das Produkt betrifft.
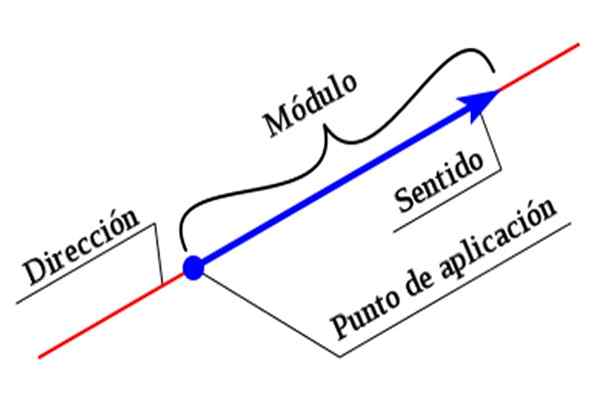 Abbildung 1. Die Elemente eines Vektors. Quelle: Wikimedia Commons.
Abbildung 1. Die Elemente eines Vektors. Quelle: Wikimedia Commons. Um einen Vektor vollständig zu beschreiben, ist es notwendig, alle seine Eigenschaften anzuzeigen. Die Größe oder das Modul ist ein numerischer Wert, der von einer Einheit begleitet wird, während die Richtung und Bedeutung mit Hilfe eines Koordinatensystems festgelegt werden.
Schauen wir uns ein Beispiel an: Angenommen, ein Flugzeug fliegt von einer Stadt zur anderen mit 850 km/h in Richtung. Hier haben wir einen vollständig spezifizierten Vektor, da die Größe verfügbar ist: 850 km/h, während Richtung und Bedeutung NE sind.
Vektoren werden normalerweise grafisch durch orientierte Liniensegmente dargestellt, deren Länge proportional zur Größe ist.
Um die Richtung und die Bedeutung anzugeben, ist eine Referenzlinie erforderlich, die normalerweise die horizontale Achse ist, obwohl der Norden auch als Referenz genommen werden kann, so ist der Fall der Geschwindigkeit der Ebene:
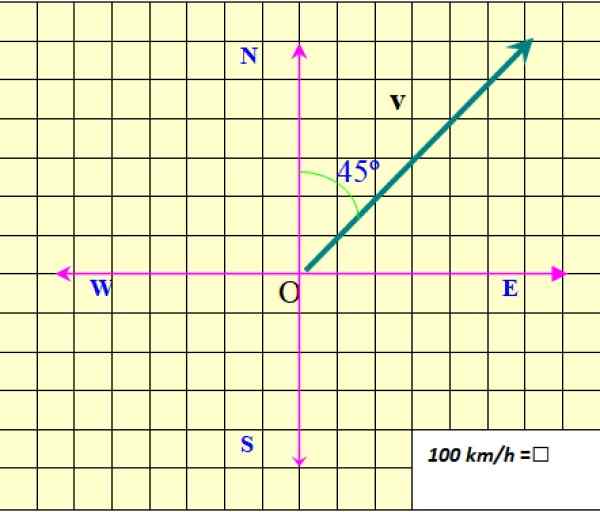 Figur 2. Ein Geschwindigkeitsvektor. Quelle: f. Zapata.
Figur 2. Ein Geschwindigkeitsvektor. Quelle: f. Zapata. Die Abbildung zeigt den Geschwindigkeitsvektor der Ebene, der als bezeichnet wird v In deutlich, Unterscheiden Sie es von einer skalaren Menge.
[TOC]
Elemente eines Vektors
Wie wir gesagt haben, sind die Vektorelemente:
-Größe oder Modul, manchmal auch als Absolutwert oder Vektorstandard bezeichnet.
-Adresse
-Sinn
Im Beispiel von Abbildung 2 das Modul von v Es ist 850 km/h. Das Modul wird als V ohne Fett oder als | bezeichnetv|, Wo die Balken den absoluten Wert darstellen.
Die Adresse von v wird in Bezug auf den Norden spezifiziert. In diesem Fall ist es 45º nördlich des Ostens (45º NE). Schließlich informiert die Spitze des Pfeils über die Richtung von v.
In diesem Beispiel wurde der Vektorursprung durch Zufällen mit dem Ursprung oder dem Koordinatensystem gezeichnet, dies wird als bezeichnet als Verknüpfter Vektor. Wenn der Ursprung des Vektors nicht dem des Referenzsystems entspricht, wird gesagt, dass es a ist freier Vektor.
Es ist zu beachten, dass diese drei Elemente angezeigt werden müssen, um den Vektor vollständig anzugeben, ansonsten wäre die Beschreibung des Vektors unvollständig.
Rechteckige Komponenten eines Vektors
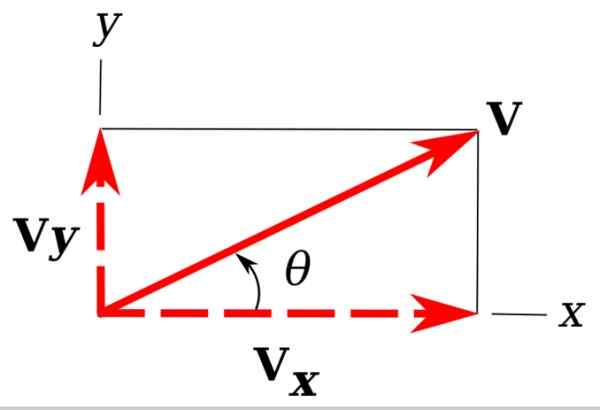 Figur 3. Rechteckige Komponenten eines Vektors in der Ebene. Quelle: Wikimedia Commons. Unher [CC BY-SA 3.0 (https: // creativecommons.Org/lizenzen/by-sa/3.0)]]
Figur 3. Rechteckige Komponenten eines Vektors in der Ebene. Quelle: Wikimedia Commons. Unher [CC BY-SA 3.0 (https: // creativecommons.Org/lizenzen/by-sa/3.0)]] Im Bild haben wir unseren Beispielvektor zurück v, Das ist im Flugzeug Xy.
Es ist leicht zu bemerken, dass V -Projektionen auf den X- und Y -Koordinatenachsen ein rechtes Dreieck bestimmen. Diese Projektionen sind vUnd Und vX und werden rechteckige Komponenten von genannt v.
Ein Weg zu bezeichnen v Durch seine rechteckigen Komponenten ist es so: v =
Wenn sich der Vektor im dreidimensionalen Raum befindet, wird eine weitere Komponente benötigt, so dass:
v =
Kennt man die rechteckigen Komponenten, die Größe des Vektors wird berechnet, was dem Hypotenuse des rechten Dreiecks entspricht, dessen Beine sind, deren Beine sind vX Und vUnd,. Durch den Pythagoras -Theorem folgt das:
|v|2 = (vX)2 + (vUnd)2
Polarform eines Vektors
Wenn die Vektorgröße bekannt ist |v| Und den Winkel θ, dass diese Form mit der Referenzachse, normalerweise die horizontale Achse, der Vektor gleichermaßen angegeben ist. Es wird dann gesagt, dass der Vektor in polarer Form ausgedrückt wird.
Rechteckige Komponenten in diesem Fall lassen sich leicht berechnen:
vX = |v|.cos θ
vUnd = |v|.Sünde θ
Nach den oben genannten rechteckigen Komponenten des Geschwindigkeitsvektors v des Flugzeugs wäre:
vX = 850 . cos 45º km/h = 601.04 km/h
vUnd = 850 . Sen 45º km/h = 601.04 km/h
Leute
Es gibt verschiedene Arten von Vektoren. Es gibt Vektoren, Position, Verschiebung, Kraft, elektrisches Feld, Bewegungsmenge und vieles mehr. Wie wir bereits gesagt haben, gibt es in der Physik viele Vektorgrößen.
Für Vektoren mit bestimmten Eigenschaften können wir die folgenden Arten von Vektoren erwähnen:
-Null: Dies sind Vektoren, deren Größe 0 ist und die als bezeichnet werden als 0. Denken Sie daran, dass der fette Buchstabe die drei grundlegenden Eigenschaften eines Vektors symbolisiert, während der normale Buchstaben nur für das Modul repräsentiert.
Zum Beispiel muss die Kräftesumme über einen Körper im statischen Gleichgewicht ein Nullvektor sein.
-Kostenlos und verknüpft: Freie Vektoren sind diejenigen, deren Herkunfts- und Ankunftspunkte ein Paar von Punkten der Ebene oder des Raums sind, im Gegensatz zu verknüpften Vektoren, deren Ursprung mit dem des Referenzsystems zusammenfällt, der verwendet wird, um sie zu beschreiben.
Das Paar oder Moment, das von ein paar Kräften erzeugt wird, ist ein gutes Beispiel für freien Vektor, da das Drehmoment nicht für einen bestimmten Punkt gilt.
-Ausrüstung: Es sind zwei freie Vektoren, die identische Eigenschaften teilen. Daher haben sie die gleiche Größe, Richtung und Bedeutung.
-Coplanares oder Coplanarios: Vektoren, die zur gleichen Ebene gehören.
-Gegensätze: Vektoren mit gleicher Größe und Richtung, aber entgegengesetzten Sinnen. Der Vektor widersprach einem Vektor v Es ist der Vektor -v Und die Summe von beiden ist der Nullvektor: v + (-v) = 0.
-Gleichzeitig: Vektoren, deren Aktionslinien alle durch denselben Punkt verlaufen.
-Gleiten: sind jene Vektoren, deren Anwendungspunkt entlang einer bestimmten Linie rutschen kann.
-Kolineal: Vektoren, die sich auf derselben Linie befinden.
-Unitaries: Diese Vektoren, deren Modul 1 ist.
Orthogonale Einheitsvektoren
Es gibt einen sehr nützlichen Vektorentyp in der Physik, der orthogonale Einheitsvektor bezeichnet wird. Der orthogonale Einheitsvektor verfügt.
Es gibt eine Reihe von speziellen Vektoren, die dazu beitragen, andere Vektoren leicht zu repräsentieren und Operationen mit ihnen auszuführen Yo, J Und k, Unitaries und senkrecht zueinander.
In zwei Dimensionen sind diese Vektoren im gesamten positiven Sinne beider Achse gerichtet X Ab der Achse Und. Und in drei Abmessungen wird ein Einheitsvektor in Richtung der Achse hinzugefügt z positiv. Sie sind wie folgt dargestellt:
Kann Ihnen dienen: Was ist die Struktur der Dokumentarfschung??Yo =
J =
k =
Ein Vektor kann durch Einheitsvektoren dargestellt werden Yo, J Und k folgendermaßen:
v = vX Yo + vUnd J + vz k
Zum Beispiel der Geschwindigkeitsvektor v Aus den vorherigen Beispielen können Sie als:
v = 601.04 Yo + 601.04 J km/h
Die Komponente in k Es ist nicht notwendig, da sich dieser Vektor in der Ebene befindet.
Summe von Vektoren
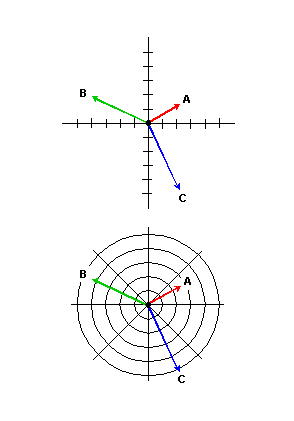
Die Summe der Vektoren erscheint in verschiedenen Situationen sehr häufig, beispielsweise wenn Sie die resultierende Kraft auf einem Objekt finden möchten, das von verschiedenen Kräften beeinflusst wird. Angenommen, Sie haben zwei kostenlose Vektoren oder Und v Auf dem Flugzeug zeigt die folgende Links:
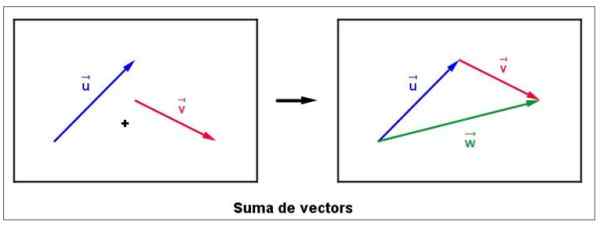 Figur 4. Grafische Summe von zwei Vektoren. Quelle: Wikimedia Commons. LLUC CABANACH [CC BY-SA 3.0 (https: // creativecommons.Org/lizenzen/by-sa/3.0)]].
Figur 4. Grafische Summe von zwei Vektoren. Quelle: Wikimedia Commons. LLUC CABANACH [CC BY-SA 3.0 (https: // creativecommons.Org/lizenzen/by-sa/3.0)]]. Er bewegt sich sofort zum Vektor v, ohne seine Größe, Richtung oder Bedeutung zu modifizieren, so dass sie mit dem Ende von zusammenfällt oder.
Der Summenvektor heißt W und wird von dir abgezogen, wenn du in endet in v, Nach der richtigen Zahl. Es ist wichtig zu beachten, dass die Größe des Vektors W Es ist nicht unbedingt die Summe der Größen von v Und oder.
Wenn es sich in dieser Hinsicht sorgfältig widerspiegelt, ist die einzige Gelegenheit, wenn die Größe des resultierenden Vektors die Summe der Größen der Addends ist.
Und was passiert, wenn die Vektoren nicht frei sind? Es ist auch sehr einfach, sie hinzuzufügen. Die Möglichkeit zu tun, Komponentenkomponenten oder analytische Methode hinzuzufügen.
Lassen Sie uns beispielsweise die Vektoren der folgenden Abbildung betrachten, das erste, was sie aus einer der zuvor erklärten kartesischen Formen ausdrücken:
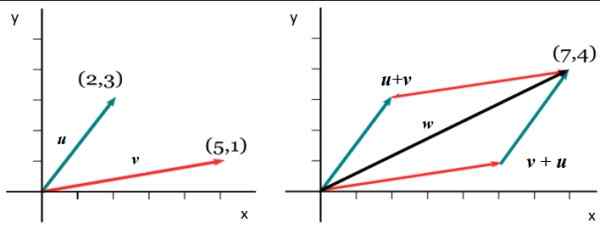 Abbildung 5. Summe von zwei verknüpften Vektoren. Quelle: Wikimedia Commons.
Abbildung 5. Summe von zwei verknüpften Vektoren. Quelle: Wikimedia Commons. v =
oder =
Um die Komponente in zu erhalten X des Vektors fügt hinzu W, Die jeweiligen Komponenten werden in hinzugefügt X von v Und oder: WX = 5+2 = 7. Und zu bekommen WUnd Ein analoges Verfahren wird befolgt: WUnd = 1+3. Deshalb:
oder =
Eigenschaften der Summe der Vektoren
-Die Summe von zwei oder mehr Vektoren führt zu einem anderen Vektor.
-Es ist kommutativ, die Reihenfolge der Ergänzungen verändert die Summe nicht, so dass:
oder + v = v + oder
-Das neutrale Element der Summe der Vektoren ist der Nullvektor: v + 0 = v
-Die Subtraktion von zwei Vektoren ist definiert als die Summe des Gegenteils: v - u = v + (-oder)
Beispiele für Vektoren
Wie wir gesagt haben, gibt es zahlreiche Vektormengen in der Physik. Zu den bekanntesten gehören:
-Position
-Verschiebung
-Durchschnittsgeschwindigkeit und sofortige Geschwindigkeit
-Beschleunigung
-Gewalt
-Bewegung
-Drehmoment oder Moment der Kraft
-Impuls
-elektrisches Feld
-Magnetfeld
-Magnetisches Moment
Andererseits sind sie keine Vektoren, sondern das Klettern:
-Zeit
-Masse
-Temperatur
-Volumen
-Dichte
-Mechanische Arbeit
-Energie
-Hitze
-Leistung
-Stromspannung
-Elektrischer Strom
Andere Operationen zwischen Vektoren
Zusätzlich zur Summe und Subtraktion von Vektoren gibt es drei weitere Operationen zwischen sehr wichtigen Vektoren, da sie neue sehr wichtige physikalische Größen hervorrufen:
-Produkt eines Skalars für einen Vektor.
-Das skalare Produkt oder das Punktprodukt zwischen Vektoren
-Und das Kreuz- oder Vektorprodukt zwischen zwei Vektoren.
Produkt eines Skalars für einen Vektor
Betrachten Sie Newtons zweites Gesetz, das angibt, dass diese zwingen F und Beschleunigung Zu Sie sind proportional. Die Verhältnismäßigkeitskonstante ist die Masse M des Objekts, deshalb:
F = m.Zu
Der Teig ist ein Skalar; Stärke und Beschleunigung sind Vektoren. Da die Kraft durch Multiplizieren der Masse mit der Beschleunigung erhalten wird, ist sie das Ergebnis des Produkts eines Skalars durch einen Vektor.
Kann Ihnen dienen: Beispiele für den theoretischen RahmenDiese Art von Produkt führt immer zu einem Vektor. Hier ein weiteres Beispiel: die Menge an Bewegung. Sei P Die Vektormenge der Bewegung, v Der Geschwindigkeitsvektor und wie immer, M ist die Messe:
P = m.v
Skalarprodukt oder Punktprodukt zwischen Vektoren
Wir haben mechanische Arbeiten in die Liste der Größen gebracht, die keine Vektoren sind. Die Arbeit in der Physik ist jedoch das Ergebnis eines Betriebs zwischen Vektoren, der als Skalarprodukt, internes Produkt oder Punktprodukt bezeichnet wird.
Sei die Vektoren v Und oder, Der Punkt oder das Klettern werden zwischen ihnen definiert:
v∙oder = |v| ∙ |oder |.cos θ
Θ der Winkel zwischen ihnen sein. Aus der gezeigten Gleichung wird sofort abgeleitet, dass das Ergebnis des Punktprodukts ein Skalar ist und dass, wenn beide Vektoren senkrecht sind, ihr Skalarprodukt 0 beträgt.
Zurück zur mechanischen Arbeit W, Dies ist das skalare Produkt zwischen dem Festigkeitsvektor F und die Vektorverschiebung ℓ.
W = F∙ℓ
Wenn Vektoren in Bezug auf ihre Komponenten verfügbar sind, ist das Punktprodukt auch sehr einfach zu berechnen. Ja v =
v∙oder = vX oderX + vUnd oderUnd + vz oderz
Das Punktprodukt zwischen Vektoren ist daher kommutativ:
v∙oder = oder∙v
Produkt- oder Vektorprodukt zwischen Vektoren überschreiten
Ja v und u sind unsere beiden Beispielvektoren, das Vektorprodukt wird definiert als:
v X oder = W
Es folgt unmittelbar, dass das Kreuzprodukt zu einem Vektor führt, dessen Modul definiert ist wie:
|v X u | = | V | . | u |. Sünde θ
Wo θ Es ist der Winkel zwischen den Vektoren.
Das Kreuzprodukt ist daher nicht kommutativ v X u ≠ u X v. In der Tat v X U = - (u X V).
Wenn die beiden Beispielvektoren in Bezug auf die Einheitsvektoren ausgedrückt werden, wird die Berechnung des Vektorprodukts erleichtert:
v = vX Yo + vUnd J + vz k
oder = uX Yo + oderUnd J + oderz k
Produkte zwischen Einheitsvektoren überschreiten
Das Kreuzprodukt zwischen identischen Einheitsvektoren ist null, da der Winkel zwischen ihnen 0º beträgt. Aber unter verschiedenen Einheitenvektoren beträgt der Winkel zwischen ihnen 90º und sin 90º = 1.
Das folgende Schema hilft, diese Produkte zu finden. In Richtung des Pfeils ist es positiv und in die entgegengesetzte Richtung:
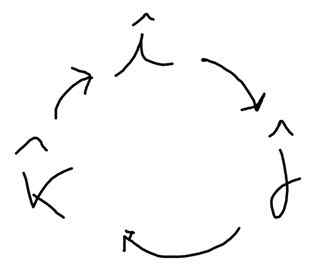
Yo X J = k, j X k = Yo; k X Yo = J; J X i = -k; k X J = -Yo; Yo X k = -J
Anwenden von Verteilungseigenschaften, die für Produkte unter den Vektoren sowie die Eigenschaften von Einheitsvektoren gültig sind, haben Sie:
v X oder = (vX Yo + vUnd J + vz k) X (uX Yo + oderUnd J + oderz k) =
= (vUndoderz - vzoderUnd )Yo + (vzoderX - vXoderz )J + (vXoderUnd - vUndoderX )k
Gelöste Übungen
- Übung 1
Angesichts der Vektoren:
v = -5 Yo + 4J + 1 k
oder = 2 Yo -3 J + 7k
Was sollte der Vektor sein? W so dass die Summe v + oder + W Ergebnisse 6 Yo +8 J -10k?
Lösung
-5 Yo + 4J + 1 k
2 Yo -3 J + 7k
WX Yo + WUnd J + Wz k +
--
6Yo + 8 J -10 k
Deshalb muss es erfüllt werden, dass:
-5 +2 + wX = 6 → wX = 9
4-3 + wUnd = 8 → wUnd = 7
1 + 7 + wz = -10 → wz = -18
Die Antwort ist: W = 9 Yo +7 J - 18k
- Übung 2
Was ist der Winkel zwischen den Vektoren? v Und oder von Übung 1?
Lösung
Wir werden das Skalarprodukt verwenden. Wir haben:
cos θ = v∙oder / |v| ∙ |oder|
v∙oder= -10 -12+7 = -15
|v| = √ (-5)2 +42 +12= √42 = 6.48
|oder| = √22 +(-3)2 +72= √62 = 7.87
Diese Werte ersetzen:
cos θ = -15 / 6.48 x 7.87 = -0.2941 → θ = 107.1
Verweise
- Figueroa, d. (2005). Serie: Physik für Wissenschaft und Ingenieurwesen. Band 1. Kinematik. Herausgegeben von Douglas Figueroa (USB).
- Giancoli, d. 2006. Physik: Prinzipien mit Anwendungen. 6. Ed Prentice Hall.
- Rex, a. 2011. Grundlagen der Physik. Pearson.
- Sears, Zemansky. 2016. Universitätsphysik mit moderner Physik. 14. Ed. Band 1.
- Serway, r., Jewett, J. 2008. Physik für Wissenschaft und Ingenieurwesen. Band 1. 7. Ed. Cengage Lernen.