

Gleichzeitige Vektoreneigenschaften, Beispiele und Übungen
- 2818
- 245
- Ivan Pressler
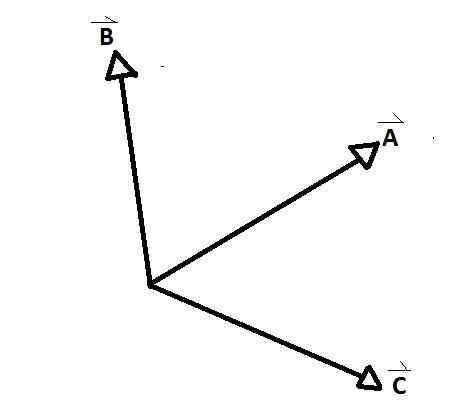
Der gleichzeitige Vektoren Sie sind die Gruppen von Vektoren, deren Achsen an einem Punkt zusammenfallen und zwischen jedem Paar von ihnen einen inneren und einen externen Winkel bilden. In der unteren Abbildung wird ein klares Beispiel beobachtet, bei dem A, B und C gleichzeitige Vektoren miteinander sind.
D und E im Gegensatz zum Rest sind nicht. Unter gleichzeitigen Vektoren AB, AC und CB sind Winkel gebildet. Beziehungswinkel zwischen Vektoren werden genannt.
[TOC]
Eigenschaften
-Sie haben einen gemeinsamen Punkt, der mit ihrem Ursprung zusammenfällt: Alle Größen der gleichzeitigen Vektoren beginnen von einem gemeinsamen Punkt bis zu ihren jeweiligen Extremen.
-Der Ursprung wird als Vektoraktionspunkt angesehen: Es muss ein Handlungspunkt festgelegt werden, der direkt von jedem der gleichzeitigen Vektoren beeinflusst wird.
-Ihre Domäne in Flugzeug und Raum ist R2 und r3 Die gleichzeitigen Vektoren können den gesamten geometrischen Raum abdecken.
-Erlaubt unterschiedliche Notationen in derselben Gruppe von Vektoren. Nach den Studienzweigen sind verschiedene Notationen bei Operationen mit Vektoren vorhanden.
Arten von Vektoren
Der Zweig der Vektoren hat mehrere Unterteilungen, darunter einige, die sie ernannt werden können: die parallele, senkrechte, koplanarios, entsprechend, entgegengesetzt und einheitlich. Gleichzeitige Vektoren erscheinen auf dieser Liste und wie alle zuvor ernannten, haben sie viele Anwendungen in verschiedenen Wissenschaften.
Sie sind in der Vektorstudie sehr häufig, weil sie eine profitable Verallgemeinerung in den Operationen mit ihnen darstellen. Sowohl in der Ebene als auch im Weltraum dienen gleichzeitige Vektoren die aktuelle Verwendung für die Darstellung verschiedener Elemente und untersuchen ihren Einfluss auf ein bestimmtes System.
Vektornotation
Es gibt verschiedene Möglichkeiten, ein Vektorelement darzustellen. Die wichtigsten und bekanntesten sind:
Kartesischer
Vorgeschlagen durch denselben mathematischen Ansatz bezeichnet Vektoren mit einer Liste, die den Größen jeder Achse entspricht (x, y, z)
A: (1, 1, -1) Raum A: (1, 1) Plan
Polar
Sie dienen nur dazu, Vektoren in der Ebene zu bezeichnen, obwohl in der integralen Berechnung die Tiefenkomponente zugewiesen wird. Es besteht mit einer linearen Größe R und ein Winkel in Bezug auf die polare Achse Ɵ.
Kann Ihnen dienen: Inferenzstatistik: Geschichte, Merkmale, Wo was es heißt, BeispieleA: (3, 450 ) Plan A: (2, 450 , 3) Raum
Analytisch
Definieren Sie die Größen des Vektors durch die Versekten. Die Verstern (R & E + K) stellen die Einheitsvektoren dar, die den Achsen entsprechen X, y Und
A: 3i + 2j - 3k
Sphärisch
Sie ähneln der polaren Notation, aber mit dem Zugabe eines zweiten Winkels, der in der Ebene fegt Xy symbolisiert durch δ.
A: (4, 60entweder , π/4)
Operationen mit gleichzeitigen Vektoren
Gleichzeitige Vektoren werden hauptsächlich verwendet, um Operationen zwischen Vektoren zu definieren, da es einfacher ist, die Elemente der Vektoren zu vergleichen, wenn sie gleichzeitig auftreten.
Sum (a + b)
Die Summe der gleichzeitigen Vektoren zielt darauf ab, den resultierenden Vektor zu finden VR. Die gemäß dem Studienzweig einer endgültigen Aktion entspricht
Zum Beispiel: 3 Saiten sind a, b, c an eine Box gebunden, jedes Ende des Seils befindet sich in den Händen eines Subjekts. Jedes der 3 Probanden muss das Seil in eine andere Richtung als die anderen 2 ziehen.
A: (ax, ay, az) b: (bx, by, bz) c: (cx, cy, cz)
A+b+c = (ax+bx+cx; ay+nach+cy; az+bz+cz) = VR
Die Box kann sich daher nur in eine Richtung bewegen VR wird die Richtung und das Gefühl der Verschiebung der Box angeben.
Unterschied (a - b)
Es gibt viele Kriterien bezüglich des Unterschieds zwischen den Vektoren, viele Autoren entscheiden sich dafür, sie auszuschließen und behaupten, dass nur die Summe zwischen den Vektoren festgelegt ist, wobei die Differenz die Summe des entgegengesetzten Vektors ist. Die Wahrheit ist, dass algebraisch Vektoren abgezogen werden können.
A: (ax, ay, az) b: (bx, by, bz)
A-b = a + (-b) = (ax-bx; ay-be; Az-bz) = [ax + (-bx); ay + (-by); AZ + (-BZ)]
Skalarprodukt (a . B)
Auch als Punto -Produkt bekannt, erzeugt einen skalaren Wert, der laut Studienzweig mit mehreren Größen in Verbindung gebracht werden kann.
Für die Geometrie gibt die parallelogramme Fläche an. Für die mechanische Physik definiert die Arbeit mit einer Kraft F Durch Bewegen eines Körpers eine Entfernung ΔR.
Es kann Ihnen dienen: zusammengesetzte Verhältnismäßigkeit: Erklärung, drei zusammengesetzte Regel, Übungenѡ = f . ΔR
Wie der Name schon sagt, erzeugt es einen skalaren Wert und wird wie folgt definiert:
Sei die Vektoren A und B
A: (ax, ay, az) b: (bx, by, bz)
-Analytische Form:
( ZU . B) = | a |.| B |.Cos θ
Wobei θ der innere Winkel zwischen beiden Vektoren ist
-Algebraische Form:
( ZU . B) = (AX.BX + ay.von + az.Bz)
Vektorprodukt (a x b)
Das Vektor- oder Punktprodukt zwischen zwei Vektoren definiert einen dritten Vektor C Das hat die Qualität, senkrecht zu sein B Und C. In der Physik definiert das Vektordrehmoment τ Grundelement der Rotationsdynamik.
-Analytische Form:
| A X B | = | A |.| B |.Sünde θ
-Algebraische Form:
(A x b) = = (AX . von - ay . BX)- (AX . BZ - AZ . bx) J + (Axt . von - ay . bx) k
-Relative Bewegung: RA/b
Die Grundlage der Relativitätstheorie ist die relative Bewegung und die gleichzeitigen Vektoren sind die Grundlage für die relative Bewegung. Sie können Positionen, Geschwindigkeiten und relative Beschleunigungen ableiten, indem Sie die folgende Reihenfolge der Ideen anwenden.
R A/b = rZU - RB ; Relative Position in Bezug auf B
v A/b = vZU - vB ; Relative Geschwindigkeit des Respekts gegen B
Zu A/b = aZU - ZuB ; Relative Beschleunigung des Respekts gegen B
Beispiele: gelöste Übungen
Übung 1
Lassen Sie A, B und C gleichzeitige Vektoren.
A = (-1, 3, 5) b = (3, 5, -2) c = (-4, -2, 1)
-Definieren Sie den resultierenden Vektor VR = 2a - 3b + c
2a = (2 (-1), 2 (3), 2 (5)) = (-2, 6, 10)
-3b = (-3 (3), -3 (5), -3 (-2)) = (-9, -15, 6)
VR = 2a + (-3b) + c = (-2, 6, 10) + (-9, -15, 6) + (-4, -2, 1)
VR = ([-2+(-9)+(-4)]; [6+(-15)+(-2)]; (10+6+1))
VR = (-15, -11, 17)
-Definieren Sie das Skalarprodukt (a . C)
( ZU . C) = (-1, 3, 5) . (-4, -2, 1) = (-1) (-4) + 3 (-2) + 5 (1) = 4 -6 + 5
( ZU . C) = 3
-Berechnen Sie den Winkel zwischen a und c
( ZU . C) = | a |.| C |.Cos θ wobei θ der kürzeste Winkel zwischen Vektoren ist




θ = 88,630
-Finden Sie einen Vektor senkrecht zu A und B
Dafür ist es notwendig, das Vektorprodukt zwischen (-1, 3, 5) und (3, 5, -2) zu definieren. Wie bereits erläutert, wird eine 3 x 3 -Matrix gebaut, in der die erste Zeile aus der Liste der Einheitenvektoren besteht (I, J, K). Dann besteht die 2. und 3. Reihe aus den zu betriebenen Vektoren und respektiert die operative Reihenfolge.
Kann Ihnen dienen: Dezimalnotation(A x b) = = [(-1) . 5 - (3 . 3) ] Yo - [(-1) . (-2) - (5 . 3) ] J + [(-1) . 5 - (3 . 3) ] k
(A x b) = (-5 - 9) Yo - (2 - 15) J + (-5 - 9) k
(A x b) = -14 i + 13 j - 14 k
Übung 2
Lass vZu und vB Die Geschwindigkeitsvektoren von A bzw. B. Berechnen Sie die B -Geschwindigkeit von a.
VZu = (3, -1, 5) vB = (2, 5, -3)
In diesem Fall wird die relative Geschwindigkeit von B von angefordert VB/a
VB/a = VB - VZU
VB/a = (2, 5, -3) -(3, -1, 5) = (-1, 6, -8)
Dies ist der Veloc -Vektor von B aus a. Wobei ein neuer Vektor der B -Geschwindigkeit durch Bezug.
Vorgeschlagene Übungen
1-konstruiere 3 Vektoren A, B und C, die gleichzeitig sind und 3 Operationen zwischen ihnen durch eine praktische Übung in Beziehung setzen.
2 -Vektoren a: (-2, 4, -11), b: (1, -6, 9) und c: (-2, -1, 10). Finden Sie senkrechte Vektoren zu: A und B, C und B, Sum A + B + C.
4-determin-3-Vektoren, die senkrecht zueinander sind, ohne die Koordinatenachsen zu berücksichtigen.
5 definieren Sie die Arbeit, die mit einer Kraft geleistet wird, die einen 5-kg-Masseblock aus dem Boden eines 20 m tiefen Brunnens hebt.
6-Swamker-Algebraik, dass die Subtraktion von Vektoren der Summe des gegenüberliegenden Vektors entspricht. Rechtfertigen Sie Ihre Postulate.
7-Denote Ein Vektor in allen in diesem Artikel entwickelten Notationen. (Kartesischer, Polar, Analytik und sphärisch).
8-Die Magnetkräfte, die auf einen Magneten ausgeübt werden, der auf einer Tabelle ruht, wird von den folgenden Vektoren angegeben; V: (5, 3, -2), t: (4, 7, 9), H: (-3, 5, -4). Bestimmen Sie, in welcher Richtung sich der Magnet bewegt, wenn alle Magnetkräfte gleichzeitig wirken.
Verweise
- Euklidische Geometrie und Transformationen. Clayton w. Ausweichen. Couer Corporation, 1. Januar. 2004
- So lösen Sie Mathematikprobleme anwenden l. Moiseiwitsch. Couer Corporation, 10 April. 2013
- Grundkonzepte der Geometrie. Walter Prenowz, Meyer Jordan. Rowman & Littlefield, 4. Oktober. 2012
- Die Vektoren. Rocío Navarro Lacoba, 7. Juni. 2014
- Lineare Algebra. Bernard Kolman, David R. HÜGEL. Pearson Education, 2006
- « Timolphthalein -Eigenschaften, Vorbereitung und Anwendungen
- Atomismusgeschichte, Theorie, Postulate und Vertreter »