

Vektoren im Weltraum, wie man darstellt, Anwendungen, Übungen
- 787
- 72
- Rieke Scheer
A Vektor im Weltraum Es wird alles durch ein Koordinatensystem dargestellt, das von gegeben wurde X, Und Und z. Fast immer das Flugzeug Xy Es ist die Ebene der horizontalen Oberfläche und der Achse z repräsentiert die Höhe (oder Tiefe).
Die in Abbildung 1 gezeigten kartesischen Koordinatenachsen unterteilen den Raum in 8 Regionen, die genannt werden Oktaver, analog zu wie die Achsen X - Und Teilen Sie die Ebene in 4 Quadranten auf. Wir werden dann 1. Oktober, 2. Ocanto usw. haben.
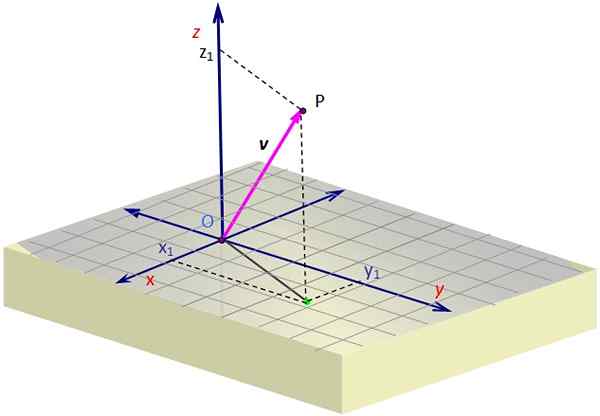
Abbildung 1. Ein Vektor im Weltraum. Quelle: Selbst gemacht. Abbildung 1 enthält eine Darstellung eines Vektors v Im Weltall. Eine gewisse Perspektive ist erforderlich, um die Illusion von drei Dimensionen auf der Ebene des Bildschirms zu erstellen, was durch Zeichnen einer schrägen Ansicht erreicht wird.
Um einen 3D -Vektor zu gratschen, müssen Sie den gepunkteten Linien helfen, die die Koordinaten der Projektion oder "Schatten" des Gitters bestimmen v Über der Oberfläche Röntgen- und. Diese Projektion beginnt in O und endet am grünen Punkt.
Dort müssen Sie die Vertikale bis zur Höhe (oder Tiefe) nach dem Wert von fortsetzen z, bis du zu P. Der Vektor wird aus O gezeichnet und endet in P, was im Beispiel im 1. Oktober ist.
[TOC]
Anwendungen
Vektoren im Weltraum werden in Mechanik und anderen Zweigen der Physik und Technik häufig verwendet, da die Strukturen, die uns umgeben, in den drei Abmessungen Geometrie erfordern.
Positionsvektoren im Raum werden verwendet, um Objekte in Bezug auf einen Referenzpunkt genannt zu positionieren Herkunft ENTWEDER. Daher sind sie auch notwendige Tools in der Navigation, aber das ist nicht alles.
Kann Ihnen dienen: Elektromagnetische Wellen: Maxwell -Theorie, Typen, MerkmaleDie Kräfte, die auf Strukturen wie Bolzen, Stützen, Kabel, Streben und mehr wirken. Um seine Wirkung zu kennen, müssen Sie Ihre Adresse (und auch Ihren Bewerbungspunkt) kennenlernen, um zu kennen.
Und häufig ist die Richtung einer Kraft durch zwei Punkte im Raum bekannt, die zu ihrer Handlungslinie gehören. Auf diese Weise ist die Kraft:
F = F oder
Wobei f die Größe oder das Modul der Kraft ist und oder Es ist der Einheitsvektor (Modul 1), der entlang der Wirklinie von gerichtet ist F.
3D -Vektor -Notation und Darstellungen
Vor der Lösung einiger Beispiele wird die Notation von 3D -Vektoren kurz überprüft.
Im Beispiel von Abbildung 1 hat Vektor V, dessen Ursprungspunkt mit dem Ursprung zusammenfällt oder und dessen Ende Punkt P ist, Koordinaten X Und z positiv, während sie koordinieren Und Es ist negativ. Diese Koordinaten sind: X1, Und1, z1, die genau die Koordinaten von p sind.
Wenn wir also einen Vektor haben, der mit dem Ursprung verknüpft ist, der mit O zusammenfasst, ist es sehr einfach, seine Koordinaten anzuzeigen, die die des Extrempunkts oder P sein werden. Um zwischen einem Punkt und einem Vektor zu unterscheiden, werden wir für die neuesten kräftigen Buchstaben und Klammern wie folgt verwenden:
v = < x1, Und1, z1 >
Während Punkt P mit Klammern bezeichnet wird:
P = (x1, Und1, z1)
Eine andere Darstellung nutzt Einheitsvektoren Yo, J Und k das definiert die drei Richtungen des Raums in den Achsen X, Und Und z bzw.
Diese Vektoren sind senkrecht zueinander und bilden a Ortonormale Basis (Siehe Abbildung 2). Dies bedeutet, dass ein 3D -Vektor in Bezug auf sie geschrieben werden kann wie:
Kann Ihnen dienen: Wellenkollegs Bewegung: Eigenschaften, Arten von Wellen, Beispielev = vX Yo + vUnd J + vz k
Direktoren eines Vektors an Winkel und Cosenos
2 zeigt auch die γ -Winkel der Regisseure1, γ2 und γ3 als der Vektor v jeweils mit den Achsen X, Und Und z. Wenn Sie diese Winkel und die Größe des Vektors kennen, wird dies vollständig bestimmt. Darüber hinaus erfüllen die Cosinus der Direktoren die folgende Beziehung:
(cos γ1)2 + (cos γ2)2 + (cos γ3)2 = 1
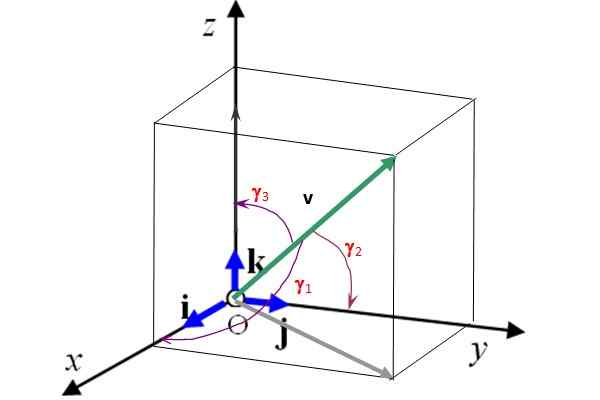 Figur 2. Einheitliche Vektoren I, J und K bestimmen die 3 bevorzugten Richtungen des Raums. Quelle: Selbst gemacht.
Figur 2. Einheitliche Vektoren I, J und K bestimmen die 3 bevorzugten Richtungen des Raums. Quelle: Selbst gemacht. Gelöste Übungen
-Übung 1
In Abbildung 2 die γ -Winkel1, γ2 und γ3 als der Vektor v von Modul 50 Form mit den Koordinatenachsen sind jeweils: 75.0º, 60.0º und 34.3. Finden Sie die kartesischen Komponenten dieses Vektors und stellen Sie sie in Bezug auf die Einheitsvektoren dar Yo, J Und k.
Lösung
Die Projektion des Vektors v auf der Achse X ist vX = 50 . Cos 75º = 12.941. Ebenso die Projektion von v auf der Achse Und ist vUnd = 50 cos 60 º = 25 und schließlich auf der Achse z ist vz = 50. cos 34.3. = 41.3. Jetzt v kann ausgedrückt werden als:
v = 12.9 Yo + 25.0 J + 41.3 k
-Übung 2
Finden Sie Spannungen in jedem der Kabel, die den Eimer der Figur im Gleichgewicht halten, wenn das Gewicht von 30 n beträgt.
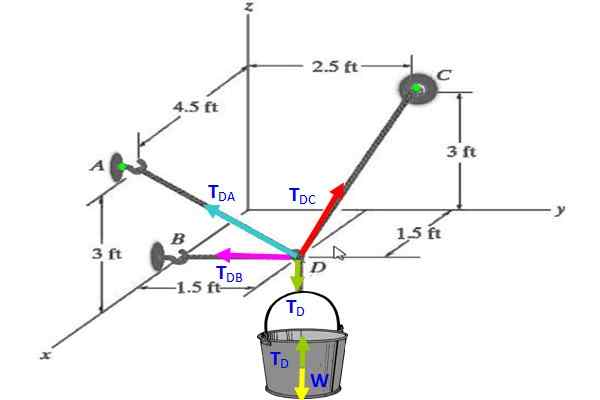 Figur 3. Spannungsdiagramm für Übung 2.
Figur 3. Spannungsdiagramm für Übung 2. Lösung
Auf dem Eimer zeigt das freie Körperdiagramm das an TD (grün) kompensiert das Gewicht W (gelb), deshalb tD = W = 30 n.
Im Knoten der Vektor TD Es ist vertikal nach unten gerichtet, dann:
TD = 30 (-k) N.
Um die verbleibenden Spannungen festzustellen, müssen Sie die folgenden Schritte ausführen:
Schritt 1: Finden Sie die Koordinaten aller Punkte
A = (4.5; 0; 3) (a ist auf der Wandebene X-z)
B = (1.5; 0; 0) (B ist auf der x -Achse)
Kann Ihnen dienen: Adresse (physisch)C = (0, 2.5, 3) (C ist auf der Wandebene und z)
D = (1.5; 1.5; 0) (D befindet sich auf der horizontalen Ebene Röntgen- und)
Schritt 2: Finden Sie die Vektoren in jeder Richtung, indem Sie die Koordinaten des Endes und des Anfangs subtrahieren
Gibt =
DC =
Db =
Schritt 3: Berechnen Sie Module und Einheitsvektoren
Ein Einheitsvektor wird durch Ausdruck erhalten: oder = R / r, mit R (fett) ist der Vektor und R (ohne fett) das Modul des Vektors aus diesem Vektor.
Da = (32 + (-1.5)2 + 32)½ = 4.5; Dc = (-1.5) 2 + 12 + 32)½ = 3.5
oderGibt = 4.5 =
oderDC = 3.5 =
oderDb =
oderD =
Schritt 4: Drücken Sie alle Spannungen als Vektoren aus
TGibt = TGibt oderGibt = TGibt
TDC = TDC oderDc = TDC
TDb = TDb oderDb = TDb
TD = 30
Schritt 5: Wenden Sie den Zustand des statischen Gleichgewichts an und lösen Sie das Gleichungssystem
Schließlich wird der statische Gleichgewichtszustand auf den Eimer angewendet, so dass die Vektorsumme aller Kräfte auf dem Knoten nichtig ist:
TGibt + TDC + TDb + TD = 0
Da die Spannungen im Weltraum sind, führt es für jede Komponente zu einem Drei -Gleichungssystem (X, und und z) von Spannungen.
0.67 tGibt -0.43 tDC + 0 tDb = 0
-0.33 tGibt + 0.29 tDC - TDb = 0
0.67 tGibt + 0.86 tDC +0 tDb - 30 = 0
Die Lösung ist: tGibt = 14.9 n; TGibt = 23.3 n; TDb = 1.82 n
Verweise
- Bedford, 2000. ZU. Mechanik für das Engineering: Statisch. Addison Wesley. 38-52.
- Figueroa, d. Serie: Physik für Wissenschaft und Ingenieurwesen. Band 1. Kinematik.31-68.
- Physisch. Modul 8: Vektoren. Geborgen von: frtl.Utn.Edu.ar
- Hibbeler, R. 2006. Mechaniker für Ingenieure. Statisch. 6. Ausgabe. Kontinental Redaktionsfirma. 15-53.
- Additionsrechnervektor. Erholt von: 1728.Org
- « Berechnung des Balancer -Vektors, Beispiele, Übungen
- Was ist das Tal in der Physik?? (Mit Beispielen) »